当前位置:网站首页>cartographer_ fast_ correlative_ scan_ matcher_ 2D branch and bound rough matching
cartographer_ fast_ correlative_ scan_ matcher_ 2D branch and bound rough matching
2022-06-26 05:13:00 【Ancient road】
cartographer_fast_correlative_scan_matcher_2d Branch and bound rough matching
0. introduction
fast_correlative_scan_matcher_2d It's right real_time_correlative_scan_matcher_2d Accelerated optimization of algorithm .
The documents involved are :
mapping/internal/constraint/constraint_builder_2d.cc :
/** * @brief Perform constraint calculation of local search window ( Loop back detection for local subgraphs ) * * @param[in] submap_id submap Of id * @param[in] submap Single submap * @param[in] node_id Node id * @param[in] constant_data Node data * @param[in] initial_relative_pose The initial value of the constraint */ void ConstraintBuilder2D::MaybeAddConstraint( const SubmapId& submap_id, const Submap2D* const submap, const NodeId& node_id, const TrajectoryNode::Data* const constant_data, const transform::Rigid2d& initial_relative_pose) { //... // Create a new matcher for the subgraph const auto* scan_matcher = DispatchScanMatcherConstruction(submap_id, submap->grid()); // Generate a calculation constraint task auto constraint_task = absl::make_unique<common::Task>(); constraint_task->SetWorkItem([=]() LOCKS_EXCLUDED(mutex_) { ComputeConstraint(submap_id, submap, node_id, false, /* match_full_submap */ constant_data, initial_relative_pose, *scan_matcher, constraint); }); // ... }/** * @brief Compute a constraint between nodes and subgraphs ( Loop back detection ) * Rough matching with a matcher based on branch and bound algorithm , And then use ceres Perform fine matching * * @param[in] submap_id submap Of id * @param[in] submap Map data * @param[in] node_id node id * @param[in] match_full_submap Is it local matching or full subgraph matching * @param[in] constant_data Node data * @param[in] initial_relative_pose The initial value of the constraint * @param[in] submap_scan_matcher matcher * @param[out] constraint Calculated constraints */ void ConstraintBuilder2D::ComputeConstraint( const SubmapId& submap_id, const Submap2D* const submap, const NodeId& node_id, bool match_full_submap, const TrajectoryNode::Data* const constant_data, const transform::Rigid2d& initial_relative_pose, const SubmapScanMatcher& submap_scan_matcher, std::unique_ptr<ConstraintBuilder2D::Constraint>* constraint) { // ... // Step:2 Use the matcher based on branch and bound algorithm for rough matching if (submap_scan_matcher.fast_correlative_scan_matcher->Match( initial_pose, constant_data->filtered_gravity_aligned_point_cloud, options_.min_score(), &score, &pose_estimate)) { // We've reported a successful local match. CHECK_GT(score, options_.min_score()); kConstraintsFoundMetric->Increment(); kConstraintScoresMetric->Observe(score); } else { return; } // Step:3 Use ceres Perform fine matching , It is the function used for front-end scan matching ceres::Solver::Summary unused_summary; ceres_scan_matcher_.Match(pose_estimate.translation(), pose_estimate, constant_data->filtered_gravity_aligned_point_cloud, *submap_scan_matcher.grid, &pose_estimate, &unused_summary); //....mapping/internal/2d/scan_matching/fast_correlative_scan_matcher_2d.cc :
mapping/internal/2d/scan_matching/real_time_correlative_scan_matcher_2d.cc :
Every step of the following is for a pair node<-->submap Prepare for constraints between subgraphs .
1. Multi resolution map construction
// Create a new matcher for the subgraph
const auto* scan_matcher =
DispatchScanMatcherConstruction(submap_id, submap->grid());
// Create a new matcher for each subgraph
const ConstraintBuilder2D::SubmapScanMatcher*
ConstraintBuilder2D::DispatchScanMatcherConstruction(const SubmapId& submap_id,
const Grid2D* const grid) {
CHECK(grid);
// ...
auto& scan_matcher_options = options_.fast_correlative_scan_matcher_options();
auto scan_matcher_task = absl::make_unique<common::Task>();
// Generate a task that will initialize the matcher , The multi-resolution map will be calculated during initialization , More time-consuming
scan_matcher_task->SetWorkItem(
[&submap_scan_matcher, &scan_matcher_options]() {
// Initialize the matcher , With the creation of multi-resolution maps
submap_scan_matcher.fast_correlative_scan_matcher =
absl::make_unique<scan_matching::FastCorrelativeScanMatcher2D>(
*submap_scan_matcher.grid, scan_matcher_options);
});
//...
}
stay FastCorrelativeScanMatcher2D Constructor to build multi-resolution map at the same time .
- PrecomputationGrid2D: Maps of different resolutions
- PrecomputationGridStack2D: Map storage with different resolutions
// The resolution increases gradually , i=0 Is the default resolution 0.05, i=6 when , width=64, That is to say 64 A lattice composes a value
for (int i = 0; i != options.branch_and_bound_depth(); ++i) {
const int width = 1 << i; // 2^i
// Construct maps of different resolutions PrecomputationGrid2D
precomputation_grids_.emplace_back(grid, limits, width,
&reusable_intermediate_grid);
}
offset I don't want to take a closer look at the calculation of what , There is no difficulty , Just trim it carefully , You can refer to When the front-end map grows :

Slide the window to create a multi-resolution map :

Actually, the grid is still there , Only the value becomes the maximum value , Some small details can be seen in the code :

therefore , It can be concluded that the stored data is similar to the image pyramid but different ( The size of the overall picture has not changed , Multiresolution map cell The number doesn't change , Just every one cell The probability value of is equal to the maximum value of all probabilities in the large resolution , Not merged into a large grid ), At the bottom (front) The highest resolution of is the original resolution (0.05m):
for (int i = 0; i != options.branch_and_bound_depth(); ++i) {
const int width = 1 << i; // 2^i
// Construct maps of different resolutions PrecomputationGrid2D
precomputation_grids_.emplace_back(grid, limits, width,
&reusable_intermediate_grid);
}
The final results are shown in the paper :

2. Generate candidate frames
Most of the front is related to Front end violence matching The steps are the same , stay θ \theta θ After generating candidate sets in steps , For the search window ( x , y x,y x,y) It is further reduced according to the actual situation :
// Reduce the size of the search window , Calculate the maximum moving range of each frame point cloud when the last point can be within the map range
search_parameters.ShrinkToFit(discrete_scans, limits_.cell_limits());
Get the lowest resolution layer ( The grid is the thickest ) And calculate the score of each candidate solution , Sort according to the matching score from big to small , Return to the arranged candidates , This step is no different from the front end .
const std::vector<Candidate2D> lowest_resolution_candidates = ComputeLowestResolutionCandidates(discrete_scans, search_parameters);
3. Filter the best candidate frames based on branch and bound
/** * @brief Branch and bound search algorithm based on multi-resolution map * * @param[in] discrete_scans Grid coordinates of each point of multiple point clouds on the map * @param[in] search_parameters Search for configuration parameters * @param[in] candidates Candidate solution * @param[in] candidate_depth Search tree height * @param[in] min_score Minimum score of candidate points * @return Candidate2D Optimal solution */
Candidate2D FastCorrelativeScanMatcher2D::BranchAndBound(
const std::vector<DiscreteScan2D>& discrete_scans,
const SearchParameters& search_parameters,
const std::vector<Candidate2D>& candidates, const int candidate_depth,
float min_score) const {
This article It is easy to understand the explanation of branch and bound , Carry a little :
The process of branching is the process of adding child nodes to the tree
Delimit ( Pruning process ) Is to check the upper and lower bounds of the subproblem in the process of branching ( If the problem is to find the maximum value, set the last , The minimum is the lower bound ), If the subproblem cannot produce a better solution than the current optimal solution , Then cut off the whole one . Until none of the subproblems can produce a better solution , The algorithm ends

- A Root node , Represents the entire solution space ω
- JKLMNOPQ Is a leaf node , Represents a specific solution
- BCDEFGHI It's an intermediate node , Represent the solution space ω Some part of the molecular space of
Specific process :
A m. BCDE, Sort by priority ;
B m. FGHI, Sort by priority ;
F m. JKLM, Sort by priority ;
On the leaf node , Calculation JKLM The maximum value of the objective function , Write it down as best_score( The initial value is negative infinity );
Go back to the previous level G, Calculation G The value of the objective function of , And best_score Compare :
if best_score Still the biggest , On the other hand G Pruning , Continue to calculate H The value of the objective function of ;
if G The objective function value of is greater than best_score, On the other hand G Branching NOPQ, Calculation NOPQ The maximum value of the objective function , And best_score Compare , to update best_score;
This article The reason for setting the probability value of multi-resolution map is well explained . In fact, the essence of branch and bound is depth first search plus a pruning operation :
1、 Search from the root node , Search to The lowest leaf node , obtain score The maximum of , Write it down as best_score.
2、 Return to the previous node , Let's see if its score is greater than best_score, If it is , Continue branching ( If there is still more than at the bottom layer best_score The score of is updated best_score And record ), If not , You can prune directly , Discard this node and all child nodes . Because the score of a node represents the upper bound of the score of its child nodes , If the upper bounds are less than best_score, It is impossible for any child node to score higher than it .
This article Examples are easy to understand :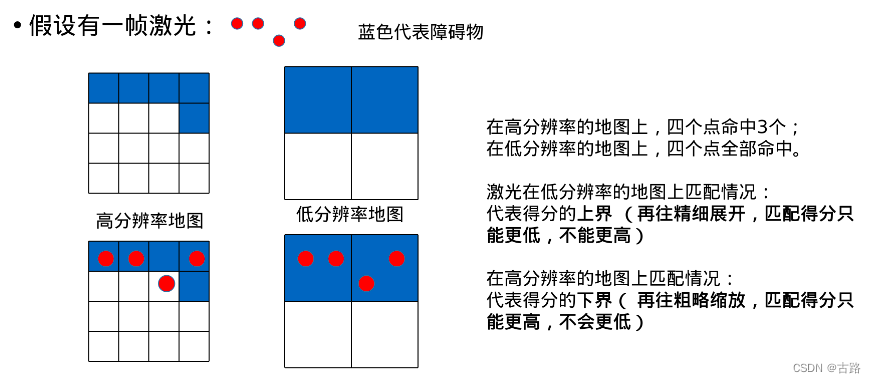

Clear thinking , So let's look at the code DFS:

In fact, the solutions are sorted , So it's faster , The solution will only be found in the left part !
/** * @brief Branch and bound search algorithm based on multi-resolution map * * @param[in] discrete_scans Grid coordinates of each point of multiple point clouds on the map * @param[in] search_parameters Search for configuration parameters * @param[in] candidates Candidate solution * @param[in] candidate_depth Search tree height * @param[in] min_score Minimum score of candidate points * @return Candidate2D Optimal solution */
Candidate2D FastCorrelativeScanMatcher2D::BranchAndBound(
const std::vector<DiscreteScan2D>& discrete_scans,
const SearchParameters& search_parameters,
const std::vector<Candidate2D>& candidates, const int candidate_depth,
float min_score) const {
// This function is solved recursively
// First, the conditions of recursive termination are given , That is, if you arrive at the 0 layer ( Whether the ), It means that we have found a leaf node .
// At the same time, in each iteration process, we arrange the candidate points of the new extension in descending order
// So the leaf node of the team leader is the optimal solution , Just go back
if (candidate_depth == 0) {
// Return the best candidate.
return *candidates.begin();
}
// Then create a temporary candidate solution , And set the score to min_score
Candidate2D best_high_resolution_candidate(0, 0, 0, search_parameters);
best_high_resolution_candidate.score = min_score;
// Traverse all candidate points
for (const Candidate2D& candidate : candidates) {
// Step: prune Below set threshold perhaps The highest score of a feasible solution lower than the upper level The feasible solution of does not continue to branch
// If the score of a candidate point is lower than the threshold , Then the score of the candidate solution behind will also be lower than the threshold , You can jump out of the loop
if (candidate.score <= min_score) {
break;
}
// If for The loop can continue to run , It indicates that the current candidate point is a better choice , It needs to be branched
std::vector<Candidate2D> higher_resolution_candidates;
// The search step is reduced to half of the upper level
const int half_width = 1 << (candidate_depth - 1);
// Step: m. Yes x、y Offset to traverse , Find out candidate Four child node candidate solutions of
for (int x_offset : {
0, half_width}) {
// Can only take 0 and half_width
// If you exceed the limit , Just skip.
if (candidate.x_index_offset + x_offset >
search_parameters.linear_bounds[candidate.scan_index].max_x) {
break;
}
for (int y_offset : {
0, half_width}) {
if (candidate.y_index_offset + y_offset >
search_parameters.linear_bounds[candidate.scan_index].max_y) {
break;
}
// The candidates advanced in turn , altogether 4 individual , It can be seen that , The branch and bound method branches the four child nodes in the lower right corner
higher_resolution_candidates.emplace_back(
candidate.scan_index, candidate.x_index_offset + x_offset,
candidate.y_index_offset + y_offset, search_parameters);
}
}
// For the newly generated 4 Score and sort the candidate solutions , The same point cloud , Different maps --> To the corresponding multiresolution map
// depth: 7-->0 The resolution of the : low ( Thick grid )--> high ( Fine lattice )
ScoreCandidates(precomputation_grid_stack_->Get(candidate_depth - 1),
discrete_scans, search_parameters,
&higher_resolution_candidates);
// Recursively call BranchAndBound For the newly generated higher_resolution_candidates To search
// Continue to branch to the node with the highest score , Up to the bottom , Then return to the penultimate layer for iteration
// If the highest score of the penultimate layer is not the lowest score of the previous one ( Cotyledon layer ) The score is high , Then skip ,
// Otherwise, continue to branch down and score
// Step: Delimit best_high_resolution_candidate.score
// In the future, better solutions found through recursive calls will pass std::max Function to update the known optimal solution .
best_high_resolution_candidate = std::max(
best_high_resolution_candidate,
BranchAndBound(discrete_scans, search_parameters,
higher_resolution_candidates, candidate_depth - 1,
best_high_resolution_candidate.score));
}
return best_high_resolution_candidate;
}
Learn to think , The details will be forgotten for a long time .
4.ceres_scan_matcher_2d Fine matching
go back to mapping/internal/constraint/constraint_builder_2d.cc
/** * @brief Compute a constraint between nodes and subgraphs ( Loop back detection ) * Rough matching with a matcher based on branch and bound algorithm , And then use ceres Perform fine matching * * @param[in] submap_id submap Of id * @param[in] submap Map data * @param[in] node_id node id * @param[in] match_full_submap Is it local matching or full subgraph matching * @param[in] constant_data Node data * @param[in] initial_relative_pose The initial value of the constraint * @param[in] submap_scan_matcher matcher * @param[out] constraint Calculated constraints */
void ConstraintBuilder2D::ComputeConstraint(
const SubmapId& submap_id, const Submap2D* const submap,
const NodeId& node_id, bool match_full_submap,
const TrajectoryNode::Data* const constant_data,
const transform::Rigid2d& initial_relative_pose,
const SubmapScanMatcher& submap_scan_matcher,
std::unique_ptr<ConstraintBuilder2D::Constraint>* constraint)
After using branch and bound rough matching , Continue to use ceres Perform fine matching :
// Step:3 Use ceres Perform fine matching , It is the function used for front-end scan matching
ceres::Solver::Summary unused_summary;
ceres_scan_matcher_.Match(pose_estimate.translation(), pose_estimate,
constant_data->filtered_gravity_aligned_point_cloud,
*submap_scan_matcher.grid, &pose_estimate,
&unused_summary);
This part Reference article .
边栏推荐
- localStorage浏览器本地储存,解决游客不登录的情况下限制提交表单次数。
- The first gift of the project, the flying oar contract!
- CMakeLists.txt Template
- How to make your big file upload stable and fast?
- 递归遍历目录结构和树状展现
- Image translation /gan:unsupervised image-to-image translation with self attention networks
- Two step processing of string regular matching to get JSON list
- ECCV 2020 double champion team, take you to conquer target detection on the 7th
- Classic theory: detailed explanation of three handshakes and four waves of TCP protocol
- AD教程系列 | 4 - 创建集成库文件
猜你喜欢
![[unity3d] human computer interaction input](/img/4d/47f6d40bb82400fe9c6d624c8892f7.png)
[unity3d] human computer interaction input

关于支付接口回调地址参数字段是“notify_url”,签名过后的特殊字符url编码以后再解码后出现错误(¬ , ¢, ¤, £)

Zuul 實現動態路由
The parameter field of the callback address of the payment interface is "notify_url", and an error occurs after encoding and decoding the signed special character URL (,,,,,)

How MySQL deletes all redundant duplicate data

瀚高数据库自定义操作符‘!~~‘

Schematic diagram of UWB ultra high precision positioning system

LeetCode 19. 删除链表的倒数第 N 个结点
Mise en œuvre du routage dynamique par zuul

Windows下安装Tp6.0框架,图文。Thinkphp6.0安装教程
随机推荐
UWB超高精度定位系统架构图
Tp5.0框架 PDO连接mysql 报错:Too many connections 解决方法
data = self._data_queue.get(timeout=timeout)
Introduction to classification data cotegory and properties and methods of common APIs
[greedy college] Figure neural network advanced training camp
Replacing domestic image sources in openwrt for soft routing (take Alibaba cloud as an example)
The parameter field of the callback address of the payment interface is "notify_url", and an error occurs after encoding and decoding the signed special character URL (,,,,,)
apktool 工具使用文档
Datetime data type - min() get the earliest date and date_ Range() creates a date range, timestamp() creates a timestamp, and tz() changes the time zone
《财富自由之路》读书之一点体会
Create a binary response variable using the cut sub box operation
[greedy college] recommended system engineer training plan
Day3 data type and Operator jobs
Muke.com actual combat course
86. (cesium chapter) cesium overlay surface receiving shadow effect (gltf model)
cartographer_pose_graph_2d
Excellent learning ability is your only sustainable competitive advantage
First day of deep learning and tensorflow learning
超高精度定位系统中的UWB是什么
[latex] error type summary (hold the change)