当前位置:网站首页>Ros2 pre basic tutorial | using cmakelists Txt compile ros2 node
Ros2 pre basic tutorial | using cmakelists Txt compile ros2 node
2022-06-22 15:14:00 【Fish flavored ROS】
The author of this series of tutorials : Little fish
official account : Fish fragrance ROS
QQ Communication group :139707339
Teaching video address : Small fish B standing
Full document address : Fish fragrance ROS Official website
Copyright notice : Reprint and commercial use are prohibited unless permitted .
Though through make call Makefile Compiling code is very convenient , But we still need to write by hand gcc Instructions to compile , Is there any way to automatically generate Makefile Well ?
The answer is yes , That's it cmake Tools .
cmake By calling CMakeLists.txt Directly generate Makefile.
1. install Cmake
sudo apt install cmake
2. newly build CMakeLists.txt
stay d2lros2/d2lros2/chapt2/basic newly build CMakeLists.txt, Type in the following .
cmake_minimum_required(VERSION 3.22)
project(first_node)
#include_directories Add a specific header file search path , It's equivalent to specifying g++ Compiler -I Parameters
include_directories(/opt/ros/humble/include/rclcpp/)
include_directories(/opt/ros/humble/include/rcl/)
include_directories(/opt/ros/humble/include/rcutils/)
include_directories(/opt/ros/humble/include/rcl_yaml_param_parser/)
include_directories(/opt/ros/humble/include/rosidl_runtime_c/)
include_directories(/opt/ros/humble/include/rosidl_typesupport_interface/)
include_directories(/opt/ros/humble/include/rcpputils/)
include_directories(/opt/ros/humble/include/builtin_interfaces/)
include_directories(/opt/ros/humble/include/rmw/)
include_directories(/opt/ros/humble/include/rosidl_runtime_cpp/)
include_directories(/opt/ros/humble/include/tracetools/)
include_directories(/opt/ros/humble/include/rcl_interfaces/)
include_directories(/opt/ros/humble/include/libstatistics_collector/)
include_directories(/opt/ros/humble/include/statistics_msgs/)
# link_directories - Add multiple specific library file search paths to the project , It's equivalent to specifying g++ Compiler -L Parameters
link_directories(/opt/ros/humble/lib/)
# add_executable - Generate first_node Executable file
add_executable(first_node first_ros2_node.cpp)
# target_link_libraries - by first_node( The goal is ) Add dynamic link library , Same as specified g++ compiler -l Parameters
# The following statement replaces -lrclcpp -lrcutils
target_link_libraries(first_node rclcpp rcutils)
3. Compile code
We usually create a new directory , function cmake And compile , The advantage of this is that it won't seem so messy .
mkdir buildcd build
Create a folder , Then run cmake Instructions ,.. On behalf of the superior directory to find CMakeLists.txt.
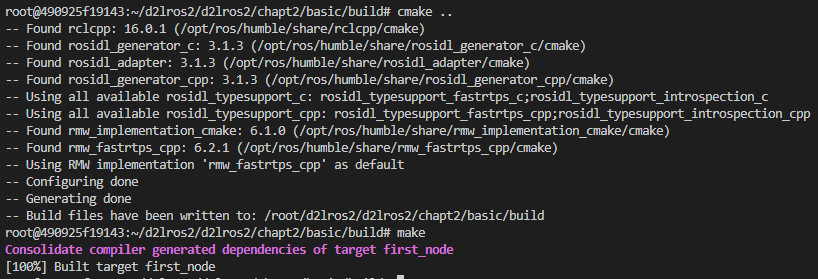
cmake ..
Run out cmake You should be able to build See under directory cmake Automatically generated Makefile 了 , Then you can run make Instructions to compile
make
Run the above instructions , You can go to build Found in the directory first_node The node .

ROS2 Pre tutorial summary :
I exist because of us ,Ubuntu It also has philosophical significance
ROS2 Pre tutorial | Install... In a virtual machine Ubuntu
ROS2 Pre tutorial | Get along well with Ubuntu The common instructions of
ROS2 Pre tutorial | Get along well with Ubuntu Programming tools for
ROS2 Pre tutorial | Get along well with Ubuntu Common software
ROS2 Pre basic tutorial | Little fish teaches you to use g++ compile ROS2 node
ROS2 Pre basic tutorial | Little fish teaches you to use make compile ROS2 node
ROS2 Advanced tutorial summary :
ROS2 Advanced tutorial | ROS2 Anti counterfeiting of operating system of system architecture
边栏推荐
- RealNetworks vs. Microsoft: the battle in the early streaming media industry
- PHP内置协议(支持的协议和封装协议)
- 轻松上手Fluentd,结合 Rainbond 插件市场,日志收集更快捷
- 数据库连接池:连接池功能点的实现
- Using pictures to locate app elements sikulix
- C # WinForm photo album function, picture zooming, dragging, preview Pagination
- Mysql学习笔记2022
- U++ iterative Sorting Query learning notes
- How to compare the size of two dates in unity and C #
- U++ 迭代 排序 查询 学习笔记
猜你喜欢
![[Software Engineering] design module](/img/08/d55af729a8241e109fdeb96c896670.png)
[Software Engineering] design module

专业“搬砖”老司机总结的 12 条 SQL 优化方案,非常实用!

What happened to those who didn't go to college
![[Software Engineering] acquire requirements](/img/52/01320eee5e519910a62f48d604b180.png)
[Software Engineering] acquire requirements
拜登签署两项旨在加强政府网络安全的新法案
![[Zhejiang University] information sharing of the first and second postgraduate entrance examinations](/img/15/298ea6f7367741e1e085007c498e51.jpg)
[Zhejiang University] information sharing of the first and second postgraduate entrance examinations
Biden signs two new laws aimed at strengthening government cyber security

那些令人懵逼的用户态&内核态
ROS2前置基础教程 | 小鱼教你用CMake依赖查找流程

RealNetworks vs. Microsoft: the battle in the early streaming media industry
随机推荐
Error: unable to find a match: lrzsz
FreeRtos 任务优先级和中断优先级
Struggle, programmer chapter 45 tenderness is like water and a good time is like a dream
Database connection pool: implementation of connection pool function point
专业“搬砖”老司机总结的 12 条 SQL 优化方案,非常实用!
利用图片实现APP元素定位sikulix
Detailed explanation of CSAPP Labs
PowerPoint tutorial, how to add watermarks in PowerPoint?
Introduction to groovy syntax
Those confusing user state & kernel state
Deadlock found when trying to get lock; Try restarting transaction
同花顺开户难么?网上开户安全么?
一篇博客让你了解Material Design的使用
C # paging calculation total pages, current page data set
U++编程 移动 学习笔记
Simulation Keil et vspd
Groovy语法介绍
【直播回顾】战码先锋第六期:共建测试子系统,赋能开发者提
Countdown to the conference - Amazon cloud technology innovation conference invites you to build a new AI engine!
求求了,别被洗脑了,这才是90%中国人的生存实况