当前位置:网站首页>Robot acceleration level task priority inverse kinematics
Robot acceleration level task priority inverse kinematics
2022-06-24 08:16:00 【ZC_ Robot robotics】
Robot acceleration level task priority inverse kinematics
The above mainly includes the main task and zero space task . It is generally applicable to the control of a 7-DOF manipulator , More priority task decomposition will lead to a large amount of computation , The requirements for the control system of the manipulator are also higher . Hierarchical Cartesian tasks , It is mainly aimed at the task accuracy control of the relevant position or attitude in the main capture direction for the specific docking task , So as to ensure the smooth progress of the capture target . The manipulator has enough degrees of freedom to complete high priority tasks ; And subtasks The task accuracy of is to ensure the accuracy of high priority tasks , The manipulator shall complete secondary tasks as much as possible ; The task of zero space is when both high priority tasks and secondary tasks are completed , The self motion configuration of the manipulator is adjusted in the zero space of the two .
In acceleration inverse kinematics , Because given the acceleration of Descartes , Therefore, it is necessary to correct the Cartesian acceleration ; In the Cartesian impedance relation , Because of the impedance relation between the end position and the attitude , So it involves the deviation of position and attitude . In impedance control , It is necessary to calculate the attitude error , Different from the position deviation correction , The attitude error can not be directly obtained from the difference between the two times . Therefore, it is necessary to make appropriate conversion according to the representation method of attitude . Attitude error is very important for impedance control and Cartesian trajectory correction in the terminal attitude direction . The attitude can be determined by Euler angle 、 Axis angle and quaternion, etc .
The inverse kinematics of acceleration level can be expressed as follows :
All in all , Robot acceleration control is the basis of robot dynamic control , Its main uses are as follows :
(1) Acceleration control highlights the high-speed and dynamic performance of the robot ;
(2) The optimal control of acceleration can put the optimization options including torque into the zero space ;
(3) Acceleration control can be used in the impedance control algorithm of robot based on torque tracking ;
边栏推荐
- 1-4metaploitable2 introduction
- JVM underlying principle analysis
- Serialization of unity
- 4-operation list (loop structure)
- Signature analysis of app x-zse-96 in a Q & a community
- 首次曝光 唯一全域最高等级背后的阿里云云原生安全全景图
- Latest news of awtk: new usage of grid control
- UTC、GMT、CST
- LabVIEW查找n个元素数组中的质数
- Leetcode 515 find the leetcode path of the maximum [bfs binary tree] heroding in each row
猜你喜欢

对于flex:1的详细解释,flex:1

OC extension detects whether an app is installed on the mobile phone (source code)

About the iframe anchor, the anchor is offset up and down, and the anchor has page display problems Srcdoc problem of iframe

Selenium IDE的安装以及使用
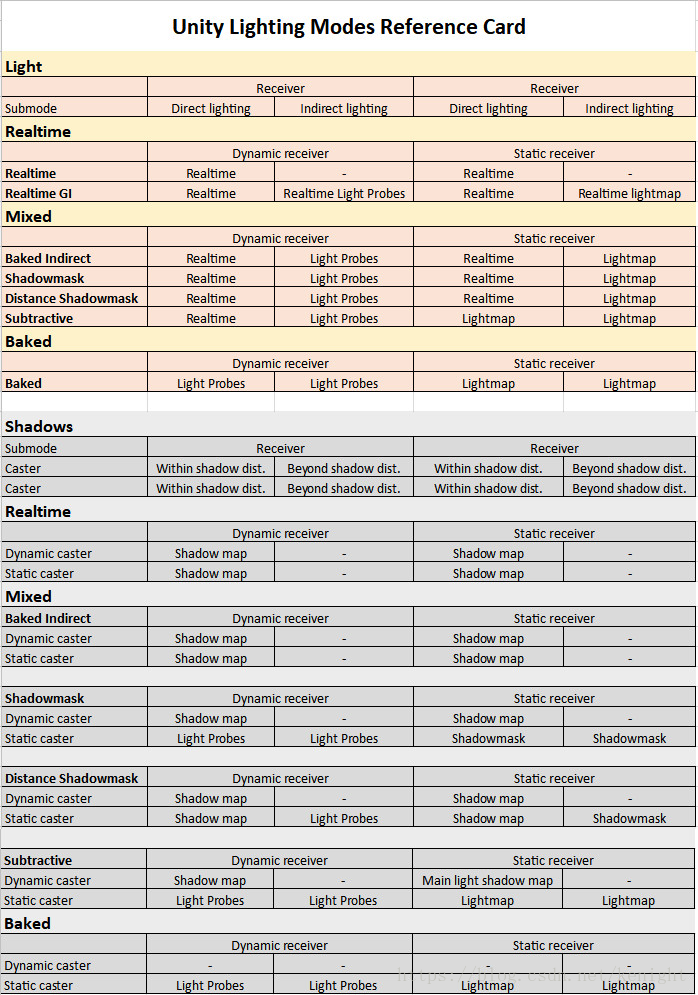
Simple summary of lighting usage

一文带你了解Windows操作系统安全,保护自己的电脑不受侵害
![[008] filter the table data row by row, jump out of the for cycle and skip this cycle VBA](/img/a0/f03b8d9c8f5e53078c38cce11f8ad3.png)
[008] filter the table data row by row, jump out of the for cycle and skip this cycle VBA
有关iframe锚点,锚点出现上下偏移,锚点出现页面显示问题.iframe的srcdoc问题
![[run the script framework in Django and store the data in the database]](/img/6b/052679e5468e5a90be5c4339183f43.png)
[run the script framework in Django and store the data in the database]

Swift Extension NetworkUtil(網絡監聽)(源碼)
随机推荐
论文笔记: 多标签学习 DM2L
Swift 基礎 閉包/Block的使用(源碼)
复习SGI STL二级空间配置器(内存池) | 笔记自用
Vulnhub target: boredhackerblog: social network
MySQL source and target table row count check
[ACNOI2022]做过也不会
Signature analysis of app x-zse-96 in a Q & a community
More appropriate development mode under epidemic situation
软件工程导论——第三章——需求分析
Blue Bridge Cup_ Queen n problem
快速读论文----AD-GCL:Adversarial Graph Augmentation to Improve Graph Contrastive Learning
3D数学基础[十七] 平方反比定理
Redolog and binlog
Installation and use of selenium IDE
5g industrial router Gigabit high speed low delay
Model effect optimization, try a variety of cross validation methods (system operation)
Vulnhub靶机:BOREDHACKERBLOG_ CLOUD AV
LINQ query (2)
13 -- 移除无效的括号
Graphmae - - lecture rapide des documents