当前位置:网站首页>Permanent magnet synchronous motor 36 question (1) -- what is the difference between salient pole motor and salient pole motor?
Permanent magnet synchronous motor 36 question (1) -- what is the difference between salient pole motor and salient pole motor?
2022-07-25 04:51:00 【Sand sinking】
In fact, this issue was also discussed in the previous blog , Let's sort it out again .
The understanding of this problem can be divided into many aspects and dimensions .
The first dimension : Numerical differences
The most direct difference between hidden pole motor and salient pole motor is , Cryptopole Motor's d Shaft inductance Ld And q Shaft inductance Lq The relationship is satisfied :Ld = Lq, and Salient pole Motor's d Shaft inductance Ld And q Shaft inductance Lq The relationship between : Ld ≠ Lq. Understand this level , You can do simulation , Corresponding simulation PMSM The setting of the module should be distinguished .

The second dimension : The difference of the maximum amplitude of the output torque
For salient pole motors , The torque expression is as follows :

For non salient pole motors , The torque expression is as follows :
You can see , The torque of salient pole motor contains two components ,Te1 = 3/2*Np*phif*iq And Te2 = 3/2*Np*(Ld-Lq)*id*iq
Ahead Te1 It is called electromagnetic torque ,Te2 It is called reluctance torque . The hidden pole motor only Te = 3/2*Np*phif*iq This component , There is no reluctance torque component .
Therefore, the inverter can output capacity , That is, when the capacity is certain , Salient pole motor can output more torque . The existence of reluctance torque can greatly improve the output torque capacity of the motor , Some motors even want to amplify this component , Increase the salient pole ratio of the motor , Amplify the magnitude of the reluctance torque , It is even more excessive to retain only this reluctance torque , Discard the excitation torque , Finally, it became the famous switched reluctance motor .
The second dimension : Differences in the structure of magnetic poles
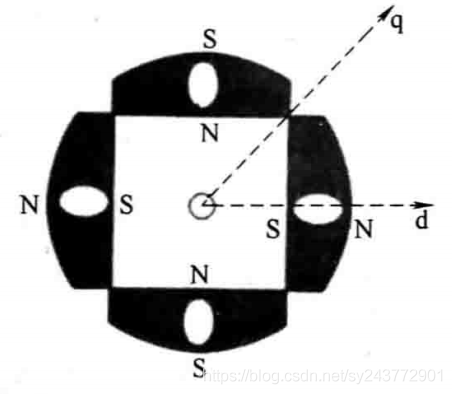
The structure of permanent magnet synchronous motor includes : Permanent magnet 、 Rotor core 、 Rotating shafts and bearings , In the motor ,d The axis of the shaft coincides with the axis of the rotor magnetic pole of the motor ;q The shaft axis is ahead d Axis 90°, That is, it is located at the geometric center line of two adjacent magnetic poles . As shown in the figure below :
Before distinguishing , We need to understand a concept , Air gap magnetic field , The specific explanation is on the website What is an air gap ?_ Baidu knows (baidu.com), I think it can be understood as the magnetic circuit that the air needs to walk , Part of the magnetic circuit , however The magnetoresistance of the air gap is larger ( If there is a better explanation, please send it to me ).
In the surface mounted permanent magnet synchronous motor , The permanent magnet is close to the outside of the rotor core , Just like a layer of permanent magnet material is evenly distributed outside the iron core , Because the permeability of the permanent magnet is basically the same as that of the air gap , therefore dq The equivalent magnetic circuit of the shaft is completely equal , It can be understood as Its The real is equal to the radius of the rotor circle . When the equivalent magnetic circuits are equal , The same magnetic field comes from d Shaft conduction and q The speed of shaft conduction is exactly the same , therefore dq The axial magnetic circuit is symmetrical , It is a hidden pole motor .

In the built-in permanent magnet synchronous motor , The permanent magnet is buried inside the iron core , Between its outer surface and the air gap, there is a pole shoe protection of ferromagnetic material ( The meaning of extreme boots : Why is extreme boots called extreme boots ? - You know (zhihu.com)), As shown in the figure below , because d Pole shoe protection exists in the magnetic circuit of the shaft ,d Equivalent air gap ratio of shaft q Larger shaft ,d Equivalent magnetic circuit ratio of shaft q The equivalent magnetic circuit of the shaft is longer , It takes longer for the magnetic field with the same strength to pass d Axis , therefore dq There is asymmetry in the axial magnetic circuit , It is a salient pole motor .

Making this asymmetry requires special processing , This not only leads to the salient pole motor is much more expensive than the hidden pole motor , There are also obvious differences in applications .
The fourth dimension : Differences in control strategies
As mentioned above , For salient pole motors , The torque expression is as follows :
For non salient pole motors , The torque expression is as follows :
The output torque of salient pole motor is not only determined by q Shaft current ( Torque current ) control , Also received d Influence of shaft current , The output torque of the hidden pole motor is only q Shaft current ( Torque current ) control ,d The shaft current only controls the size of the magnetic field , Therefore, the control of salient pole motor is more complex .
Control with the maximum torque current ratio MTPA Take an example to illustrate , The Lagrange equations of the torque current of salient pole motor and salient pole motor are as follows :

At the maximum torque output of salient pole motor id The expression of is :

When the torque of the hidden pole motor is the maximum output id Expression for :
![]()
You can see , When salient pole motor and salient pole motor realize this maximum torque current ratio control , The process is different . here MTPA And id=0 The difference of control, let's dig a hole first , Fill in later .
The fifth dimension : There are differences in the design of observers
Take the sliding mode observer as an example , The stator voltage equation of permanent magnet synchronous motor is as follows :

After the coordinate transformation to the two-phase static coordinate system , As shown in the figure below :

Salient pole motor is the model above , And hidden pole motor Ld = Lq, The two phases are directly 0. The expression is as follows

There are also differences between the two extended back EMF expressions , The extended back EMF of salient pole motor is :

The extended back EMF of the salient pole motor is :

The extended back EMF of salient pole motor includes the motor inductance 、 electric current 、 Speed factor , It is very difficult to solve the electrical angle of the motor theta, Therefore, the observation of rotor position and rotor speed is more complex . But let's look at the salient pole motor extended back EMF , Direct pair Ealpha and Ebeta Find an inverse tangent , The most critical rotor angle comes out .
The same is true of other observers , Whether full order or reduced order 、 Extended Kalman method , The complexity of observation matrix of salient pole motor is not a level compared with that of hidden pole motor , by the way Ld-Lq The interference caused by this inductive reactance component , The speed and position of the motor rotor become very complex .
In addition, it is worth mentioning that , Salient pole motor also has a very good place in observer , The salient effect caused by salient polarity can provide natural conditions for high-frequency signal injection method to extract rotor position and speed , Hidden pole motors do not have this condition . Therefore, in the current application of new energy electric vehicles , Low speed senseless strategy , Hidden pole motors have always been difficult to overcome , However, various high-frequency injection methods work well in the low-speed inductive strategy of salient pole motors .
Summary :
1、 Judge whether the permanent magnet synchronous motor is a salient pole motor , In terms of parameters, it can be based on Ld And Lq Size relationship between , The equivalent is the hidden pole motor , Unequal is salient pole motor .
2、 Judge whether the permanent magnet synchronous motor is a salient pole motor , Structurally, it can be based on dq Judge whether the axial magnetic circuit is symmetrical ,dq If the axis equivalent magnetic circuit is equal and the magnetic circuit is symmetrical, it is a hidden pole motor ,dq The shaft equivalent magnetic circuit is unequal, and the magnetic circuit is asymmetric, which is a salient pole motor .
3、 The position of the permanent magnet in the iron core is the source of all designations , According to the position of the permanent magnet in the rotor core, it can be divided into surface type and built-in type , Among them, surface type is divided into surface paste type and plug-in type . Plug in 、 The built-in type will cause the asymmetry of the magnetic circuit , Therefore, in fact, only surface mounted permanent magnet synchronous motors are hidden polarity motors .( This conclusion is actually quite absolute , But what I've seen so far are all tables posted like this , So if you have more precise comments, leave your opinions .)
4、 There are differences in the above five dimensions between salient pole motor and hidden pole motor in my understanding , Both control and application are worth exploring separately .
边栏推荐
- [cloud picture theory] 248 illustrated public network domain name resolution: easy domain name access to websites / mailboxes
- 运筹学基础【一】 之 导论
- Opencv4.5.x+cuda11.0.x source code compilation and yolov5 acceleration tutorial!
- ESWC 2018 | r-gcn: relational data modeling based on graph convolution network
- Geely and Daimler set up a joint venture to produce pure electric smart in China!
- How can I check if the number of RDS links in MySQL suddenly rises?
- When developing or debugging the IP direct scheme, it should be noted that the host value should be consistent with the direct IP
- Apple airpower was forced to cancel its launch two years after it was launched! Uncover the reason!
- [wechat applet] label (86/100)
- Grafana visual configuration diagram histogram
猜你喜欢

2022-7-15 summary
![[analysis of GPIO register (crl/crh) configuration of STM32]](/img/63/a7b262e95f1dc74201ace9d411b46f.png)
[analysis of GPIO register (crl/crh) configuration of STM32]
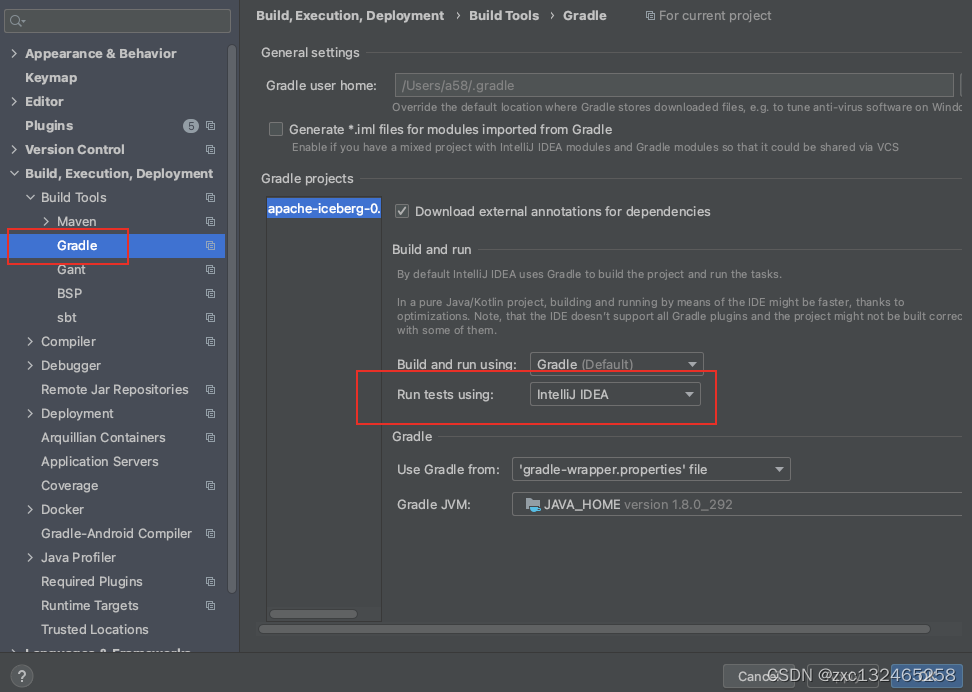
Gradle test and idea test

Grafana visual configuration diagram histogram

Open source summer interview | "after 00" PMC member Bai Zeping

暗黑王者|ZEGO 低照度图像增强技术解析

The interviewer asked MySQL transactions, locks and mvcc at one go. I

Web: compiling big refactoring from 10 to 1

Druid连接池——从0开始坚强的一点点的自学,Druid一点不懂的可以点进来,懂得别点进来,点进来你会嫌我啰嗦的
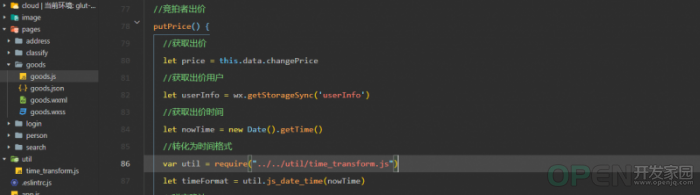
【微信小程序】拍卖商品详情页设计与交互实现(包含倒计时、实时更新出价)
随机推荐
C# 之 FileStream类介绍
Pychart configuration pyqt5
Mit.js: small event publishing and subscription library
2022-7-15 summary
Gbase 8A about no suitable driver
Analysis of lottery winning numbers in history
Grafana visual configuration diagram histogram
GDT,LDT,GDTR,LDTR
Data Lake (16): structured streaming writes iceberg in real time
中创算力荣获「2022年科技型中小企业」认定
Druid connection pool - strong self-study from 0. Those who don't understand Druid can click in. If you know not to click in, you will think I'm wordy
深入掌握Pod
运筹学基础【一】 之 导论
[cloud picture theory] 248 illustrated public network domain name resolution: easy domain name access to websites / mailboxes
Best practice cases of data security in the medical industry (desensitization version)
[ CTF 学习 ] CTF 中的隐写集合 —— 图片隐写术
GBase JDBC 连接数据库异常
Very clear organization
Wechat official account all article download links to get
看问题的角度