当前位置:网站首页>Use evo
Use evo
2022-06-25 09:41:00 【Wang bupian】
Use EVO
- evo_traj: Draw the trajectory directly
(1) Draw tracks individually :evo_traj tum KeyFrameTrajectory.txt -p
(2) Draw multiple tracks together : evo_traj tum KeyFrameTrajectory.txt CameraTrajectory2.txt --ref CameraTrajectory2.txt -va -p
perhaps : evo_traj tum KeyFrameTrajectory.txt CameraTrajectory2.txt --ref KeyFrameTrajectory.txt -va -p
The reference tracks are different , So the tracks drawn by these two commands are not exactly the same ;
among ref It's a reference trajectory ,-va Is the details after alignment ,-p Is to draw an image
(3) You can also use –plot_mode {xy,xz,yx,yz,zx,zy,xyz} To select the information to draw a plane separately
Such as :evo_traj tum KeyFrameTrajectory.txt CameraTrajectory2.txt --ref KeyFrameTrajectory.txt -va -p --plot_mode=xy
- evo_ape: Calculation of absolute pose error
evo_ape tum KeyFrameTrajectory.txt KeyFrameTrajectory.txt -va -p
Use ape There is no need to give –ref The file of ,tum The latter first file is the standard file , That is to say :evo_ape tum real .txt test .txt -va -p
- evo_rpe: Calculation of relative pose error
evo_rpe tum KeyFrameTrajectory.txt KeyFrameTrajectory.txt -va -p
Use rpe There is no need to give –ref The file of ,tum The latter first file is the standard file , That is to say :evo_rpe tum real .txt test .txt -va -p
- The other parameters
Save the file as another type of file , You can use the following handles
–save_as_tum save trajectories in TUM format (as *.tum)
–save_as_kitti save poses in KITTI format (as *.kitti)
–save_as_bag save trajectories in ROS bag as .bag
1
2
3
Save the picture
–save_plot “ Saved path ”
1
Merge tracks
–merge
1
Give the maximum timestamp difference of the data
–t_max_diff “ Specific differences ”
边栏推荐
- manhattan_slam环境配置
- How much money have I made by sticking to fixed investment for 3 years?
- 【mysql学习笔记21】存储引擎
- Voiceprint Technology (V): voiceprint segmentation and clustering technology
- Atguigu---01-scaffold
- [opencv] - Discrete Fourier transform
- PMP考试多少分算通过?
- Matplotlib plt Axis() usage
- Cubemx stm32f105rb USB flash drive reading and writing detailed tutorial
- Voiceprint Technology (I): the past and present life of voiceprint Technology
猜你喜欢

Wechat official account can reply messages normally, but it still prompts that the service provided by the official account has failed. Please try again later

Specific usage of sklearn polynomialfeatures

Fcpx quickly add subtitles | Final Cut Pro import fcpxml subtitle file does not match the video time? I got it in code
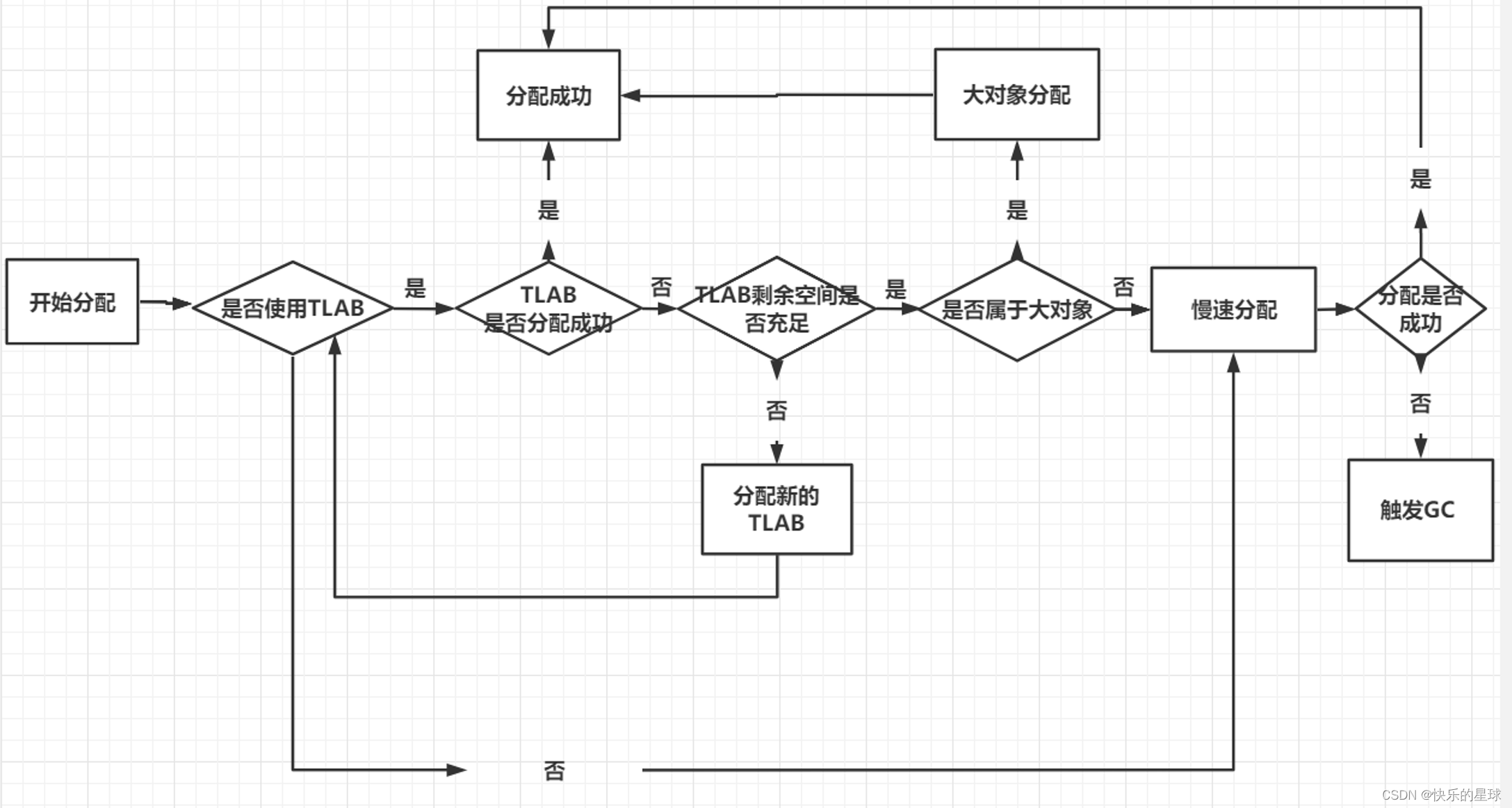
《JVM》对象内存分配的TLAB机制与G1中的TLAB流程

汇付国际为跨境电商赋能:做合规的跨境支付平台!

203 postgraduate entrance examination Japanese self-study postgraduate entrance examination experience post; Can I learn Japanese by myself?
![[buuctf.reverse] 117-120](/img/6c/8a90fff2bd46f1494a9bd9c77eeafc.png)
[buuctf.reverse] 117-120

SQL advanced

Matplotlib decision boundary drawing function plot in Matplotlib_ decision_ Boundary and plt Detailed explanation of contour function

22 mathematical modeling contest 22 contest C
随机推荐
[zufe school competition] difficulty classification and competition suggestions of common competitions in the school (taking Zhejiang University of Finance and economics as an example)
Lvs-dr mode single network segment case
x86的编码格式
2022 postgraduate entrance examination experience post -- Alibaba Business School of Hangzhou Normal University -- management science and Engineering (including the recommendation of books and course
Analysis on the thinking of 2022 meisai C question
203 postgraduate entrance examination Japanese self-study postgraduate entrance examination experience post; Can I learn Japanese by myself?
[IOU] intersection over union
[competition -kab micro entrepreneurship competition] KAB National College Students' micro entrepreneurship action participation experience sharing (including the idea of writing the application form)
Encoding format for x86
Compile time annotations for custom annotations (retentionpolicy.class)
Reza RA series - development environment construction
Mapping mode of cache
【mysql学习笔记22】索引
Is it safe to open an account online? Who can I ask?
测试开发工程师
Where are the hotel enterprises that have been under pressure since the industry has warmed up in spring?
Matplotlib plt grid()
Study on correlation of pumpkin price and design of price prediction model based on BP neural network
Use Navicat to compare data differences and structure differences of multi environment databases, and automatic DML and DDL scripts
Atguigu---01-scaffold