当前位置:网站首页>Chapter007-FPGA学习之IIC总线EEPROM读取
Chapter007-FPGA学习之IIC总线EEPROM读取
2022-07-24 06:31:00 【ASWaterbenben】
IIC总线是嵌入式领域较为重要的器件间通信总线,同样,FPGA也能通过模块的形式实现IIC的功能,其原理和STM32的模拟IIC总线一致,就是控制每个时间点的SCL、SDA总线电平。
IIC总线需要对应的从机机通信器件进行通信,故目前使用AT24C64【IIC总线的EEPROM】作为从机,通过实现对EEPROM的读、写,来学习IIC协议在FPGA的实现。
硬件原理
由于IIC本质就是2线通信方式,以从机地址作为鉴别依据,在IIC总线上进行点对点通信,故不再对细节的硬件进行描述,使用拓扑图即可说明问题,再IIC总线上,EEPROM的从机地址为7‘h50,也就是二进制的0b1010000。
IIC总线的通信波形图我就不过多赘述,大致电文思路就是:
开始–>器件地址输出–>读写功能输出–>等待反馈–>数据地址(读/写)–>等待反馈–>数据与内容(读/写)–>等待反馈–>结束
相关线路的引脚如下:
时序分为写时序、读时序,具体内容如下:
写时序: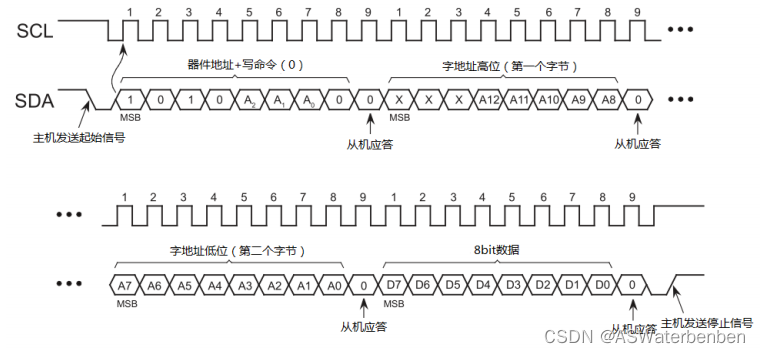
连续写就是将8bit的数据与往后继续发送;
读时序:
若要实现连续读,将最后一个主机非应答变为主机应答即可,需要读几个就应答几次。
设计目标
设计目标为将EEPROM中,地址从0开始到255顺序写入0 ~ 255的数值,写入完成后,将地址0 ~ 255的数据读取出来,并检查是否地址与数据相对应,若数据与地址完全一致,则使红色PL_LED闪烁、否则PL_LED常亮。
使用到的资源为:
1、IIC的SCL线和SDA线
2、用于指示的LED灯
3、复位和系统时钟
模块分析
由于需要使用到EEPROM外设,而外设使用IIC总线进行通信,故首先需要实现IIC总线驱动模块;
输入:
位控制信号【数据地址可能位0 ~ 255(8bit)或0 ~ 65535(16bit)】
系统时钟
IIC的数据地址
IIC需要写入的数据【8bit】
IIC使能信号
IIC读写控制信号
模块复位信号
输出:
上层模块的控制时钟【用于让上层模块使用匹配的频率向该模块发送数据】
IIC是否收到应答的标志
IIC读取到的数据【8bit】
IIC当前操作完成标志
IIC总线的SCL信号
IIC总线的SDA信号
当有了IIC的驱动模块后,上层的功能只需要将对应的地址、数据按一定的节拍发送给IIC驱动模块,即可实现IIC的通信,故需要实现EEPROM的读写给,需要有一个读写流程的逻辑模块实现这一功能;
输入:
IIC操作时钟
IIC是否收到应答的标志
IIC读取到的数据【8bit】
IIC当前操作完成标记
复位
输出:
需要操作的IIC地址
IIC写入的数据
IIC驱动模块的使能信号
IIC的读写标记
读写完成标记【用于驱动LED模块】
读写结果【用于驱动LED模块】
最后就是之前提到的用于描述实验是否成功的LED模块,若写入和读取内容一致,则LED闪烁,若不一致则LED长亮;
输入:
运行时钟
复位
读写完成标记
读写结果
输出:
LED灯控制信号
之后使用上层模块将上述子模块例化,即可得到整体设计;
输入:
系统时钟
复位
输出:
IIC_CLK
IIC_SDA
LED
模块原理图如下所示:
代码编辑
Verilog语言的代码包括以下几个部分:
一个用于例化子模块的顶层模块;
- IIC驱动模块【i2c_driver.v】
- EEPROM读写控制模块【eeprom_rw.v】
- led报警模块【led_alarm.v】
顶层模块相关代码
顶层模块代码(eeprom_top.v):
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2022/07/21 21:29:06
// Design Name:
// Module Name: eeprom_top
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module eeprom_top(
input sys_clk , //系统时钟
input sys_rst_n , //系统复位
//eeprom interface
output iic_scl , //eeprom的时钟线scl
inout iic_sda , //eeprom的数据线sda
//user interface
output led //led显示
);
//parameter define
parameter SLAVE_ADDR = 7'b1010000 ; //器件地址(SLAVE_ADDR)
parameter BIT_CTRL = 1'b1 ; //字地址位控制参数(16b/8b)
parameter CLK_FREQ = 26'd50_000_000 ; //i2c_dri模块的驱动时钟频率(CLK_FREQ)
parameter I2C_FREQ = 18'd250_000 ; //I2C的SCL时钟频率
parameter L_TIME = 17'd125_000 ; //led闪烁时间参数
//wire define
wire dri_clk ; //I2C操作时钟
wire i2c_exec ; //I2C触发控制
wire [15:0] i2c_addr ; //I2C操作地址
wire [ 7:0] i2c_data_w; //I2C写入的数据
wire i2c_done ; //I2C操作结束标志
wire i2c_ack ; //I2C应答标志 0:应答 1:未应答
wire i2c_rh_wl ; //I2C读写控制
wire [ 7:0] i2c_data_r; //I2C读出的数据
wire rw_done ; //E2PROM读写测试完成
wire rw_result ; //E2PROM读写测试结果 0:失败 1:成功
//*****************************************************
//** main code
//*****************************************************
//e2prom读写测试模块
eeprom_rw u_eeprom_rw(
.clk (dri_clk ), //时钟信号
.rst_n (sys_rst_n ), //复位信号
//i2c interface
.i2c_exec (i2c_exec ), //I2C触发执行信号
.i2c_rh_wl (i2c_rh_wl ), //I2C读写控制信号
.i2c_addr (i2c_addr ), //I2C器件内地址
.i2c_data_w (i2c_data_w), //I2C要写的数据
.i2c_data_r (i2c_data_r), //I2C读出的数据
.i2c_done (i2c_done ), //I2C一次操作完成
.i2c_ack (i2c_ack ), //I2C应答标志
//user interface
.rw_done (rw_done ), //E2PROM读写测试完成
.rw_result (rw_result ) //E2PROM读写测试结果 0:失败 1:成功
);
//i2c驱动模块
i2c_driver #(
.SLAVE_ADDR (SLAVE_ADDR), //EEPROM从机地址
.CLK_FREQ (CLK_FREQ ), //模块输入的时钟频率
.I2C_FREQ (I2C_FREQ ) //IIC_SCL的时钟频率
) u_i2c_driver(
.clk (sys_clk ),
.rst_n (sys_rst_n ),
//i2c interface
.i2c_exec (i2c_exec ), //I2C触发执行信号
.bit_ctrl (BIT_CTRL ), //器件地址位控制(16b/8b)
.i2c_rh_wl (i2c_rh_wl ), //I2C读写控制信号
.i2c_addr (i2c_addr ), //I2C器件内地址
.i2c_data_w (i2c_data_w), //I2C要写的数据
.i2c_data_r (i2c_data_r), //I2C读出的数据
.i2c_done (i2c_done ), //I2C一次操作完成
.i2c_ack (i2c_ack ), //I2C应答标志
.scl (iic_scl ), //I2C的SCL时钟信号
.sda (iic_sda ), //I2C的SDA信号
//user interface
.dri_clk (dri_clk ) //I2C操作时钟
);
//led指示模块
led_alarm #(.L_TIME(L_TIME ) //控制led闪烁时间
) u_led_alarm(
.clk (dri_clk ),
.rst_n (sys_rst_n ),
.rw_done (rw_done ),
.rw_result (rw_result ),
.led (led )
);
endmodule
顶层约束文件(eeprom_top.xdc):
set_property -dict {
PACKAGE_PIN U18 IOSTANDARD LVCMOS33} [get_ports sys_clk]
set_property -dict {
PACKAGE_PIN N16 IOSTANDARD LVCMOS33} [get_ports sys_rst_n]
set_property -dict {
PACKAGE_PIN E18 IOSTANDARD LVCMOS33} [get_ports iic_scl]
set_property -dict {
PACKAGE_PIN F17 IOSTANDARD LVCMOS33} [get_ports iic_sda]
set_property -dict {
PACKAGE_PIN H15 IOSTANDARD LVCMOS33} [get_ports led]
下层功能模块代码
IIC驱动模块,负责将数据与地址操作变为IIC上的电平信号【i2c_driver.v】
该模块将IIC总线输出信号使用复杂的三段式状态机表述【同步时序表述状态转移、组合逻辑判断状态转移、各状态下正常功能执行】,具体含义可见代码注释表述;
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2022/07/21 21:36:55
// Design Name:
// Module Name: i2c_driver
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module i2c_driver
#(
parameter SLAVE_ADDR = 7'b1010000 , //EEPROM从机地址
parameter CLK_FREQ = 26'd50_000_000, //模块输入的时钟频率
parameter I2C_FREQ = 18'd250_000 //IIC_SCL的时钟频率
)
(
input clk ,
input rst_n ,
//i2c interface
input i2c_exec , //I2C触发执行信号
input bit_ctrl , //字地址位控制(16b/8b)
input i2c_rh_wl , //I2C读写控制信号
input [15:0] i2c_addr , //I2C器件内地址
input [ 7:0] i2c_data_w , //I2C要写的数据
output reg [ 7:0] i2c_data_r , //I2C读出的数据
output reg i2c_done , //I2C一次操作完成
output reg i2c_ack , //I2C应答标志 0:应答 1:未应答
output reg scl , //I2C的SCL时钟信号
inout sda , //I2C的SDA信号
//user interface
output reg dri_clk //驱动I2C操作的驱动时钟
);
//localparam define
localparam st_idle = 8'b0000_0001; //空闲状态
localparam st_sladdr = 8'b0000_0010; //发送器件地址(slave address)
localparam st_addr16 = 8'b0000_0100; //发送16位字地址
localparam st_addr8 = 8'b0000_1000; //发送8位字地址
localparam st_data_wr = 8'b0001_0000; //写数据(8 bit)
localparam st_addr_rd = 8'b0010_0000; //发送器件地址读
localparam st_data_rd = 8'b0100_0000; //读数据(8 bit)
localparam st_stop = 8'b1000_0000; //结束I2C操作
//reg define
reg sda_dir ; //I2C数据(SDA)方向控制
reg sda_out ; //SDA输出信号
reg st_done ; //状态结束
reg wr_flag ; //写标志
reg [ 6:0] cnt ; //计数
reg [ 7:0] cur_state ; //状态机当前状态
reg [ 7:0] next_state; //状态机下一状态
reg [15:0] addr_t ; //地址
reg [ 7:0] data_r ; //读取的数据
reg [ 7:0] data_wr_t ; //I2C需写的数据的临时寄存
reg [ 9:0] clk_cnt ; //分频时钟计数
//wire define
wire sda_in ; //SDA输入信号
wire [8:0] clk_divide ; //模块驱动时钟的分频系数
//*****************************************************
//** main code
//*****************************************************
//SDA控制
assign sda = sda_dir ? sda_out : 1'bz ; //SDA数据输出或高阻
assign sda_in = sda ; //SDA数据输入
assign clk_divide = (CLK_FREQ/I2C_FREQ) >> 2'd2 ; //模块驱动时钟的分频系数
//生成I2C的SCL的四倍频率的驱动时钟用于驱动i2c的操作
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
dri_clk <= 1'b0;
clk_cnt <= 10'd0;
end
else if(clk_cnt == clk_divide[8:1] - 1'd1) begin
clk_cnt <= 10'd0;
dri_clk <= ~dri_clk;
end
else
clk_cnt <= clk_cnt + 1'b1;
end
//(三段式状态机)同步时序描述状态转移
always @(posedge dri_clk or negedge rst_n) begin
if(!rst_n)
cur_state <= st_idle;
else
cur_state <= next_state;
end
//组合逻辑判断状态转移条件
always @(*) begin
next_state = st_idle;
case(cur_state)
st_idle: begin //空闲状态
if(i2c_exec) begin
next_state = st_sladdr;
end
else
next_state = st_idle;
end
st_sladdr: begin
if(st_done) begin
if(bit_ctrl) //判断是16位还是8位字地址
next_state = st_addr16;
else
next_state = st_addr8 ;
end
else
next_state = st_sladdr;
end
st_addr16: begin //写16位字地址
if(st_done) begin
next_state = st_addr8;
end
else begin
next_state = st_addr16;
end
end
st_addr8: begin //8位字地址
if(st_done) begin
if(wr_flag==1'b0) //读写判断
next_state = st_data_wr;
else
next_state = st_addr_rd;
end
else begin
next_state = st_addr8;
end
end
st_data_wr: begin //写数据(8 bit)
if(st_done)
next_state = st_stop;
else
next_state = st_data_wr;
end
st_addr_rd: begin //写地址以进行读数据
if(st_done) begin
next_state = st_data_rd;
end
else begin
next_state = st_addr_rd;
end
end
st_data_rd: begin //读取数据(8 bit)
if(st_done)
next_state = st_stop;
else
next_state = st_data_rd;
end
st_stop: begin //结束I2C操作
if(st_done)
next_state = st_idle;
else
next_state = st_stop ;
end
default: next_state= st_idle;
endcase
end
//时序电路描述状态输出
always @(posedge dri_clk or negedge rst_n) begin
//复位初始化
if(!rst_n) begin
scl <= 1'b1;
sda_out <= 1'b1;
sda_dir <= 1'b1;
i2c_done <= 1'b0;
i2c_ack <= 1'b0;
cnt <= 1'b0;
st_done <= 1'b0;
data_r <= 1'b0;
i2c_data_r<= 1'b0;
wr_flag <= 1'b0;
addr_t <= 1'b0;
data_wr_t <= 1'b0;
end
else begin
st_done <= 1'b0 ;
cnt <= cnt +1'b1 ;
case(cur_state)
st_idle: begin //空闲状态
scl <= 1'b1;
sda_out <= 1'b1;
sda_dir <= 1'b1;
i2c_done<= 1'b0;
cnt <= 7'b0;
if(i2c_exec) begin
wr_flag <= i2c_rh_wl ;
addr_t <= i2c_addr ;
data_wr_t <= i2c_data_w;
i2c_ack <= 1'b0;
end
end
st_sladdr: begin //写地址(器件地址和字地址)
case(cnt)
7'd1 : sda_out <= 1'b0; //开始I2C
7'd3 : scl <= 1'b0;
7'd4 : sda_out <= SLAVE_ADDR[6]; //传送器件地址
7'd5 : scl <= 1'b1;
7'd7 : scl <= 1'b0;
7'd8 : sda_out <= SLAVE_ADDR[5];
7'd9 : scl <= 1'b1;
7'd11: scl <= 1'b0;
7'd12: sda_out <= SLAVE_ADDR[4];
7'd13: scl <= 1'b1;
7'd15: scl <= 1'b0;
7'd16: sda_out <= SLAVE_ADDR[3];
7'd17: scl <= 1'b1;
7'd19: scl <= 1'b0;
7'd20: sda_out <= SLAVE_ADDR[2];
7'd21: scl <= 1'b1;
7'd23: scl <= 1'b0;
7'd24: sda_out <= SLAVE_ADDR[1];
7'd25: scl <= 1'b1;
7'd27: scl <= 1'b0;
7'd28: sda_out <= SLAVE_ADDR[0];
7'd29: scl <= 1'b1;
7'd31: scl <= 1'b0;
7'd32: sda_out <= 1'b0; //0:写
7'd33: scl <= 1'b1;
7'd35: scl <= 1'b0;
7'd36: begin
sda_dir <= 1'b0;
sda_out <= 1'b1;
end
7'd37: scl <= 1'b1;
7'd38: begin //从机应答
st_done <= 1'b1;
if(sda_in == 1'b1) //高电平表示未应答
i2c_ack <= 1'b1; //拉高应答标志位
end
7'd39: begin
scl <= 1'b0;
cnt <= 1'b0;
end
default : ;
endcase
end
st_addr16: begin
case(cnt)
7'd0 : begin
sda_dir <= 1'b1 ;
sda_out <= addr_t[15]; //传送字地址
end
7'd1 : scl <= 1'b1;
7'd3 : scl <= 1'b0;
7'd4 : sda_out <= addr_t[14];
7'd5 : scl <= 1'b1;
7'd7 : scl <= 1'b0;
7'd8 : sda_out <= addr_t[13];
7'd9 : scl <= 1'b1;
7'd11: scl <= 1'b0;
7'd12: sda_out <= addr_t[12];
7'd13: scl <= 1'b1;
7'd15: scl <= 1'b0;
7'd16: sda_out <= addr_t[11];
7'd17: scl <= 1'b1;
7'd19: scl <= 1'b0;
7'd20: sda_out <= addr_t[10];
7'd21: scl <= 1'b1;
7'd23: scl <= 1'b0;
7'd24: sda_out <= addr_t[9];
7'd25: scl <= 1'b1;
7'd27: scl <= 1'b0;
7'd28: sda_out <= addr_t[8];
7'd29: scl <= 1'b1;
7'd31: scl <= 1'b0;
7'd32: begin
sda_dir <= 1'b0;
sda_out <= 1'b1;
end
7'd33: scl <= 1'b1;
7'd34: begin //从机应答
st_done <= 1'b1;
if(sda_in == 1'b1) //高电平表示未应答
i2c_ack <= 1'b1; //拉高应答标志位
end
7'd35: begin
scl <= 1'b0;
cnt <= 1'b0;
end
default : ;
endcase
end
st_addr8: begin
case(cnt)
7'd0: begin
sda_dir <= 1'b1 ;
sda_out <= addr_t[7]; //字地址
end
7'd1 : scl <= 1'b1;
7'd3 : scl <= 1'b0;
7'd4 : sda_out <= addr_t[6];
7'd5 : scl <= 1'b1;
7'd7 : scl <= 1'b0;
7'd8 : sda_out <= addr_t[5];
7'd9 : scl <= 1'b1;
7'd11: scl <= 1'b0;
7'd12: sda_out <= addr_t[4];
7'd13: scl <= 1'b1;
7'd15: scl <= 1'b0;
7'd16: sda_out <= addr_t[3];
7'd17: scl <= 1'b1;
7'd19: scl <= 1'b0;
7'd20: sda_out <= addr_t[2];
7'd21: scl <= 1'b1;
7'd23: scl <= 1'b0;
7'd24: sda_out <= addr_t[1];
7'd25: scl <= 1'b1;
7'd27: scl <= 1'b0;
7'd28: sda_out <= addr_t[0];
7'd29: scl <= 1'b1;
7'd31: scl <= 1'b0;
7'd32: begin
sda_dir <= 1'b0;
sda_out <= 1'b1;
end
7'd33: scl <= 1'b1;
7'd34: begin //从机应答
st_done <= 1'b1;
if(sda_in == 1'b1) //高电平表示未应答
i2c_ack <= 1'b1; //拉高应答标志位
end
7'd35: begin
scl <= 1'b0;
cnt <= 1'b0;
end
default : ;
endcase
end
st_data_wr: begin //写数据(8 bit)
case(cnt)
7'd0: begin
sda_out <= data_wr_t[7]; //I2C写8位数据
sda_dir <= 1'b1;
end
7'd1 : scl <= 1'b1;
7'd3 : scl <= 1'b0;
7'd4 : sda_out <= data_wr_t[6];
7'd5 : scl <= 1'b1;
7'd7 : scl <= 1'b0;
7'd8 : sda_out <= data_wr_t[5];
7'd9 : scl <= 1'b1;
7'd11: scl <= 1'b0;
7'd12: sda_out <= data_wr_t[4];
7'd13: scl <= 1'b1;
7'd15: scl <= 1'b0;
7'd16: sda_out <= data_wr_t[3];
7'd17: scl <= 1'b1;
7'd19: scl <= 1'b0;
7'd20: sda_out <= data_wr_t[2];
7'd21: scl <= 1'b1;
7'd23: scl <= 1'b0;
7'd24: sda_out <= data_wr_t[1];
7'd25: scl <= 1'b1;
7'd27: scl <= 1'b0;
7'd28: sda_out <= data_wr_t[0];
7'd29: scl <= 1'b1;
7'd31: scl <= 1'b0;
7'd32: begin
sda_dir <= 1'b0;
sda_out <= 1'b1;
end
7'd33: scl <= 1'b1;
7'd34: begin //从机应答
st_done <= 1'b1;
if(sda_in == 1'b1) //高电平表示未应答
i2c_ack <= 1'b1; //拉高应答标志位
end
7'd35: begin
scl <= 1'b0;
cnt <= 1'b0;
end
default : ;
endcase
end
st_addr_rd: begin //写地址以进行读数据
case(cnt)
7'd0 : begin
sda_dir <= 1'b1;
sda_out <= 1'b1;
end
7'd1 : scl <= 1'b1;
7'd2 : sda_out <= 1'b0; //重新开始
7'd3 : scl <= 1'b0;
7'd4 : sda_out <= SLAVE_ADDR[6]; //传送器件地址
7'd5 : scl <= 1'b1;
7'd7 : scl <= 1'b0;
7'd8 : sda_out <= SLAVE_ADDR[5];
7'd9 : scl <= 1'b1;
7'd11: scl <= 1'b0;
7'd12: sda_out <= SLAVE_ADDR[4];
7'd13: scl <= 1'b1;
7'd15: scl <= 1'b0;
7'd16: sda_out <= SLAVE_ADDR[3];
7'd17: scl <= 1'b1;
7'd19: scl <= 1'b0;
7'd20: sda_out <= SLAVE_ADDR[2];
7'd21: scl <= 1'b1;
7'd23: scl <= 1'b0;
7'd24: sda_out <= SLAVE_ADDR[1];
7'd25: scl <= 1'b1;
7'd27: scl <= 1'b0;
7'd28: sda_out <= SLAVE_ADDR[0];
7'd29: scl <= 1'b1;
7'd31: scl <= 1'b0;
7'd32: sda_out <= 1'b1; //1:读
7'd33: scl <= 1'b1;
7'd35: scl <= 1'b0;
7'd36: begin
sda_dir <= 1'b0;
sda_out <= 1'b1;
end
7'd37: scl <= 1'b1;
7'd38: begin //从机应答
st_done <= 1'b1;
if(sda_in == 1'b1) //高电平表示未应答
i2c_ack <= 1'b1; //拉高应答标志位
end
7'd39: begin
scl <= 1'b0;
cnt <= 1'b0;
end
default : ;
endcase
end
st_data_rd: begin //读取数据(8 bit)
case(cnt)
7'd0: sda_dir <= 1'b0;
7'd1: begin
data_r[7] <= sda_in;
scl <= 1'b1;
end
7'd3: scl <= 1'b0;
7'd5: begin
data_r[6] <= sda_in ;
scl <= 1'b1 ;
end
7'd7: scl <= 1'b0;
7'd9: begin
data_r[5] <= sda_in;
scl <= 1'b1 ;
end
7'd11: scl <= 1'b0;
7'd13: begin
data_r[4] <= sda_in;
scl <= 1'b1 ;
end
7'd15: scl <= 1'b0;
7'd17: begin
data_r[3] <= sda_in;
scl <= 1'b1 ;
end
7'd19: scl <= 1'b0;
7'd21: begin
data_r[2] <= sda_in;
scl <= 1'b1 ;
end
7'd23: scl <= 1'b0;
7'd25: begin
data_r[1] <= sda_in;
scl <= 1'b1 ;
end
7'd27: scl <= 1'b0;
7'd29: begin
data_r[0] <= sda_in;
scl <= 1'b1 ;
end
7'd31: scl <= 1'b0;
7'd32: begin
sda_dir <= 1'b1;
sda_out <= 1'b1;
end
7'd33: scl <= 1'b1;
7'd34: st_done <= 1'b1; //非应答
7'd35: begin
scl <= 1'b0;
cnt <= 1'b0;
i2c_data_r <= data_r;
end
default : ;
endcase
end
st_stop: begin //结束I2C操作
case(cnt)
7'd0: begin
sda_dir <= 1'b1; //结束I2C
sda_out <= 1'b0;
end
7'd1 : scl <= 1'b1;
7'd3 : sda_out <= 1'b1;
7'd15: st_done <= 1'b1;
7'd16: begin
cnt <= 1'b0;
i2c_done <= 1'b1; //向上层模块传递I2C结束信号
end
default : ;
endcase
end
endcase
end
end
endmodule
LED的报警模块【led_alarm.v】
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2022/07/21 22:03:45
// Design Name:
// Module Name: led_alarm
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module led_alarm #(parameter L_TIME = 25'd25_000_000)
(
input clk , //时钟信号
input rst_n , //复位信号
input rw_done , //错误标志
input rw_result , //E2PROM读写测试完成
output reg led //E2PROM读写测试结果 0:失败 1:成功
);
//reg define
reg rw_done_flag; //读写测试完成标志
reg [24:0] led_cnt ; //led计数
//*****************************************************
//** main code
//*****************************************************
always @(posedge clk or negedge rst_n)begin
if(!rst_n)
rw_done_flag <= 1'b0;
else if(rw_done)
rw_done_flag <= 1'b1;
end
//错误标志为1时PL_LED0闪烁,否则PL_LED0常亮
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
led_cnt <= 25'd0;
led <= 1'b0;
end
else begin
if(rw_done_flag)begin
if(rw_result)
led <= 1'b1;
else begin
led_cnt <= led_cnt + 25'd1;
if(led_cnt == L_TIME - 1'b1)begin
led_cnt <= 25'd0;
led <= ~led;
end
end
end
else
led <= 1'b0;
end
end
endmodule
EEPROM的读写判断模块【eeprom_rw.v】
该部分逻辑较为简单,使用单段式状态机实现(状态跳转及状态动作在单段代码实现)。
`timescale 1ns / 1ps
//
// Company:
// Engineer:
//
// Create Date: 2022/07/21 21:34:30
// Design Name:
// Module Name: eeprom_rw
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module eeprom_rw(
input clk , //时钟信号
input rst_n , //复位信号
//i2c interface
output reg i2c_rh_wl , //I2C读写控制信号
output reg i2c_exec , //I2C触发执行信号
output reg [15:0] i2c_addr , //I2C器件内地址
output reg [ 7:0] i2c_data_w , //I2C要写的数据
input [ 7:0] i2c_data_r , //I2C读出的数据
input i2c_done , //I2C一次操作完成
input i2c_ack , //I2C应答标志
//user interface
output reg rw_done , //E2PROM读写测试完成
output reg rw_result //E2PROM读写测试结果 0:失败 1:成功
);
//parameter define
//EEPROM写数据需要添加间隔时间,读数据则不需要
parameter WR_WAIT_TIME = 14'd5000; //写入间隔时间
parameter MAX_BYTE = 16'd256 ; //读写测试的字节个数
//reg define
reg [1:0] flow_cnt ; //状态流控制
reg [13:0] wait_cnt ; //延时计数器
//*****************************************************
//** main code
//*****************************************************
//EEPROM读写测试,先写后读,并比较读出的值与写入的值是否一致
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
flow_cnt <= 2'b0;
i2c_rh_wl <= 1'b0;
i2c_exec <= 1'b0;
i2c_addr <= 16'b0;
i2c_data_w <= 8'b0;
wait_cnt <= 14'b0;
rw_done <= 1'b0;
rw_result <= 1'b0;
end
else begin
i2c_exec <= 1'b0;
rw_done <= 1'b0;
case(flow_cnt)
2'd0 : begin
wait_cnt <= wait_cnt + 1'b1; //延时计数
if(wait_cnt == WR_WAIT_TIME - 1'b1) begin //EEPROM写操作延时完成
wait_cnt <= 1'b0;
if(i2c_addr == MAX_BYTE) begin //256个字节写入完成
i2c_addr <= 1'b0;
i2c_rh_wl <= 1'b1;
flow_cnt <= 2'd2;
end
else begin
flow_cnt <= flow_cnt + 1'b1;
i2c_exec <= 1'b1;
end
end
end
2'd1 : begin
if(i2c_done == 1'b1) begin //EEPROM单次写入完成
flow_cnt <= 2'd0;
i2c_addr <= i2c_addr + 1'b1; //地址0~255分别写入
i2c_data_w <= i2c_data_w + 1'b1; //数据0~255
end
end
2'd2 : begin
flow_cnt <= flow_cnt + 1'b1;
i2c_exec <= 1'b1;
end
2'd3 : begin
if(i2c_done == 1'b1) begin //EEPROM单次读出完成
//读出的值错误或者I2C未应答,读写测试失败
if((i2c_addr[7:0] != i2c_data_r) || (i2c_ack == 1'b1)) begin
rw_done <= 1'b1;
rw_result <= 1'b1;
end
else if(i2c_addr == MAX_BYTE - 1'b1) begin //读写测试成功
rw_done <= 1'b1;
rw_result <= 1'b0;
end
else begin
flow_cnt <= 2'd2;
i2c_addr <= i2c_addr + 1'b1;
end
end
end
default : ;
endcase
end
end
endmodule
完成代码编辑后,将代码编译为二进制流,并下载到FPGA上。
实验结果
按下复位后,经过一小段时间,EEPROM读写模块校正成功,LED开始闪烁
至此,实验成功,IIC功能模块能够移植使用。
边栏推荐
- Practice of online problem feedback module (12): realize image deletion function
- An AI plays 41 games, and the comprehensive performance score of Google's latest multi game decision transformer is twice that of dqn
- 第二部分—C语言提高篇_2. 内存分区
- Redis persistence
- avaScript的流程控制语句
- Create WPF project
- MGR_ mysqlsh_ Keepalive high availability architecture deployment document
- MySql的DDL和DML和DQL的基本语法
- C language from entry to Earth - array
- 在线问题反馈模块实战(十二):实现图片删除功能
猜你喜欢

一个怎样的模式能让平台用户发生自助裂变?-链动2+1

Take you to learn C step by step (second)

FPGA实现AXI4总线的读写

【C语言】操作符详解(深入理解+整理归类)

定制 or 通用,中国 SaaS 未来发展趋势是什么?
![[waveform / signal generator] Based on stc1524k32s4 for C on Keil](/img/62/8bf96bf7617cc9b2682b5a32711878.png)
[waveform / signal generator] Based on stc1524k32s4 for C on Keil
安全工具之hackingtool

The function of extern, static, register, volatile keywords in C language; Nanny level teaching!

Three level classification / menu query tree structure

sojson jsjiami.com. V6 crawler JS reverse
随机推荐
An AI plays 41 games, and the comprehensive performance score of Google's latest multi game decision transformer is twice that of dqn
记账APP:小哈记账1——欢迎页的制作
你不可能让每个人都满意!
定制 or 通用,中国 SaaS 未来发展趋势是什么?
[learning notes] Web page rendering process
Hackingtool of security tools
MGR_ mysqlsh_ Keepalive high availability architecture deployment document
Redis 主从机制
Penetration learning - SQL injection - shooting range - installation and bypass experiment of safety dog (it will be updated later)
Libc.so.6/glibc cross compilation
【LeetCode】11. 盛最多水的容器 - Go 语言题解
树莓派换源
Use the root user to create a new user and set the password for
【方向盘】IDEA的代码审查能力,来保证代码质量
Redis master-slave mechanism
After grouping, return to the last record group in each group_ Use of concat
Requirements already satisfied: and read timed out. problem solving methods appear during the installation of snownlp package
tensorflow boolean_ Mask function
avaScript的流程控制语句
永远不要迷失自我!