当前位置:网站首页>Learning strategies of 2D target detection overview (final chapter)
Learning strategies of 2D target detection overview (final chapter)
2022-07-24 07:14:00 【Visual pioneer】
One 、 Training phase
In this part , We review several learning strategies for training target detectors . Specifically, it includes data optimization 、 Unbalanced sampling 、 Positioning refinement and other learning strategies .
1. Data to enhance
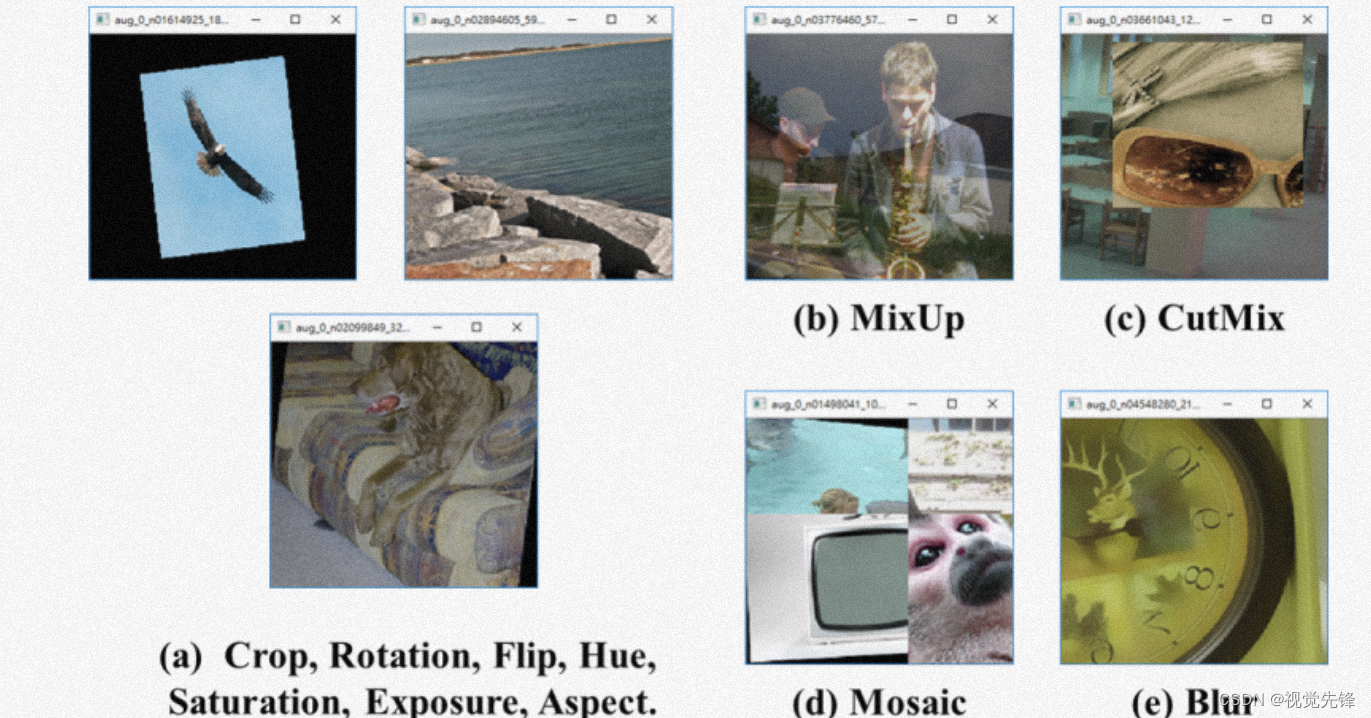
Data enhancement is important for almost all deep learning methods , Because they usually need a lot of data , More training data will produce better results . In target detection , In order to increase training data and generate training pictures with various visual characteristics ,Faster R-CNN The method of horizontal turnover is used . A more intensive data enhancement strategy is used in the single-stage detector , Including rotation 、 Random cutting 、 Expansion and color jitter . These enhancement strategies have significantly improved the detection accuracy .(albumentations The package contains a lot of data, and the enhancement methods can be used directly )

- Geometric enhancement : Including translation 、 rotate 、 Cutting and other geometric changes to the image , It can enhance the generalization ability of the model .
- Color enhancement : Mainly the brightness transformation , If you use HSV enhance .
- blurred : Such as Gaussian filtering 、 Box filtering 、 Median filtering, etc . It can enhance the generalization ability of the model to blurred images .
- mixup: The above general data enhancement method is to transform the same class , and mixup Data enhancement is achieved by modeling different categories . Different classes with different weights , The loss function obtained is also added with different weights , Finally, the parameters are calculated by back propagation .
- Random erase : The main purpose of this paper is to simulate occlusion , So as to improve the robustness of the model to occlusion . Randomly select an area , And then cover it with random values , Simulate an occluded scene .
- CutOut: Its purpose is the same as random erasure , Also simulate occlusion , By randomly selecting a square area of fixed size , Then use full 0 Just fill in . To avoid filling 0 The effect of value on training , Data should be normalized centrally .
- CutMix: Is to put a part of the area cut fall , But don't fill 0 value , Instead, it randomly fills the region pixel values of other data in the training set , The classification results are distributed in a certain proportion .
- Mosaic:cutmix Use two pictures , and mosaic Use four pictures , The advantage is that it enriches the background of object detection , And in BN When calculating, I will calculate at once 4 Picture data , bring mini-batch It doesn't need to be too big , stay GPU Get more efficient results on .
2. Validation set partition
- Direct division : The way of random division may make the training data and test data of the model very different , The generalization ability of the trained model is not strong .
- LOOCV(Leave-one-out Cross Validation): This is a K A special case of folded cross validation , namely K=N. Use only one data at a time as a test , Others are training sets , repeat N Time (N Is the number of samples in the dataset ).
- KFold: Each test set will no longer contain only one data , It's more than one. , The specific number will be regarded as K Depends on your choice . for example , if K=5, be 5 The process of cross validation is :(1) Divide all data sets into 5 Share (2) Take one of them every time without repetition to make a test set , The other four are used as training sets and training models , Then calculate the error rate of the model on each test set (3) take 5 The error rate of times is averaged to the final error rate .

3. Unbalanced sampling
In target detection , The imbalance between positive and negative samples is a key problem . in other words , Most of the regions of interest estimated as proposals are actually just background images . Few of them are positive samples . This leads to an imbalance problem when training the detector . say concretely , There are two problems to be solved : Category imbalance (class imbalance) And difficulty imbalance (difficulty imbalance). The so-called category imbalance , It means that most of the candidate proposals belong to the background , Only a few proposals contain goals . This leads to background information dominating the gradient during training . The difficulty imbalance is closely related to the first problem , Due to category imbalance , This makes background proposals easier to classify , And goals become more difficult to classify . For the problem of difficulty imbalance , There are many strategies to solve it . Some two-stage detectors , Such as R-CNN and Fast R-CNN, Most negative samples will be rejected first , And keep 2000 Proposals for further classification .
stay Fast R-CNN in , The author starts with 2000 Negative samples are randomly selected from the proposals , Every batch The proportion of positive and negative samples is 1:3, To further eliminate the adverse effects of category imbalance . The disadvantage of this method is that it cannot make full use of the information of negative sample proposals , Some negative sample proposals may contain rich contextual information , And some hard negative proposals (hard negative proposals) It can help improve the detection accuracy . Therefore, some people have proposed a hard negative sampling strategy , This strategy fixes the ratio of foreground to background , But the most difficult negative proposal was sampled to update the model . say concretely , Choose the negative proposal with higher classification loss to train the model .
In order to solve the problem of difficulty imbalance , Most sampling strategies have carefully designed loss functions . For target detection , The classifier is in C+1 Study on categories (C Target categories and 1 Background categories ). Suppose the real category label of this area is u,p Is the classifier in C+1 Discrete probability distributions of outputs on classes (p={p0,...,pC}). The loss function is as follows :

Someone also proposed a new loss function called focusing loss , It can suppress the signal of simple samples in negative samples . It does not discard all simple samples , Instead, assign importance weights to each sample , Its loss function is as follows :
 among α and γ It is a parameter that controls the importance weight . This makes the training process more focused on difficult proposals .
among α and γ It is a parameter that controls the importance weight . This makes the training process more focused on difficult proposals .
For more details about loss functions, please refer to the following links :
Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
Generalized Intersection over Union: A Metric and A Loss for Bounding BoxRegression
Bounding Box Regression with KL Loss
Towards Accurate One-Stage Object Detection with AP-Loss
DR Loss: Improving Object Detection by Distributional Ranking
4. Positioning refinement (localization refinement)
The target detector must provide close location prediction for each target (bbox or mask). Many works have been improved . Precise positioning is challenging , Because the prediction results usually focus on the most recognizable part of the object , Not necessarily the area containing objects . In some scenes , High quality algorithms are needed to make high-quality predictions ( high IoU threshold ), As shown in the figure below , It shows how the detector works at high IoU Failure under threshold conditions .

In this section, we will review some methods to refine the positioning results . stay R-CNN in , We learned L2 Auxiliary bounding box regressor to optimize positioning . stay Fast R-CNN in , Learn smooth through an end-to-end approach L1 Regressor , As shown below :
 among tc Represents the offset predicted for each target category ,v Represents the truth bounding box .x,y,z,w Represent the central coordinates and width of the bounding box respectively 、 high .
among tc Represents the offset predicted for each target category ,v Represents the truth bounding box .x,y,z,w Represent the central coordinates and width of the bounding box respectively 、 high .
5. Cascade learning :
Cascade learning is a learning strategy from rough to fine , It collects information from the output of a given classifier , Build stronger classifiers in a cascading way . In recent years , Cascade learning is also applied to detection tasks based on deep learning , Especially detect small objects in large scenes . In addition to accelerating the algorithm , Cascading learning can also integrate contextual information , Improve positioning accuracy .
There are other learning strategies that provide us with new directions , But it has not been widely explored at present . Mainly divided into the following categories :
- Against learning : Confrontational learning has made great progress in generating models . The most famous work of applied confrontation learning is generating confrontation Networks (GAN), The generator and discriminator are competitive . The generator takes the noise vector as input , Generate false images to touch your data distribution , And use these false images to confuse the discriminator , The discriminator needs to recognize the real image from the data with false image .GAN Many variants of have shown good performance in many fields . Some people suggest using GAN Small target detection . The generator learns the high-resolution feature representation of small targets . say concretely , The generator converts low resolution small areas into high-resolution features , And compete with discriminators that recognize real high-resolution . Finally, the generator learns to generate high-quality features of small objects .
- Train from the beginning : Modern target detectors mostly rely on ImageNet Pre trained classification model , However , The deviation of loss function and data distribution between classification and detection may adversely affect performance . Fine tuning the detection task can alleviate this problem , But the deviation cannot be completely eliminated . Besides , Moving the classification model to new areas for detection may bring more challenges . For these reasons , You need to train the detector from scratch , Instead of relying on the pre training model . The difficulty of training detectors from scratch is that the training data of target detection is usually insufficient , And may lead to over fitting . Unlike image classification , Object detection requires bounding box level annotations , therefore , Annotating large-scale test data sets takes a lot of time .
- Refine knowledge : Through the teacher-student training program, the knowledge in the model set is extracted into a single model . This learning strategy is first used in image classification . In terms of target detection , Someone proposed a faster method based on R-CNN The detector , The detector is optimized through the training program of teachers and students . Use R-CNN The model acts as a classroom network to guide the training process . Compared with the traditional single model optimization strategy , Their framework has improved the detection accuracy .
Two 、 Testing phase
The target detection algorithm produces a dense set of predictions , So due to a lot of repetition , These predictions cannot be directly used for evaluation . Besides , Some other learning strategies are needed to further improve the detection accuracy . These strategies improve the prediction quality or speed up the reasoning .
1. Remove redundancy
Non maximum suppression (NMS) It is an integral part of target detection , False positive sample prediction for de duplication . As shown in the figure below :

The target detection algorithm generates a dense set of predictions , It contains multiple repeated predictions . For single-stage Detection Algorithm , They generate a dense set of candidate proposals , Such as SSD or DSSD. Proposals around the same goal may have similar confidence , This leads to false positives . For the two-stage detection algorithm that generates sparse proposals , The bounding box regressor will bring the proposal closer to the same goal , This leads to the same problem . Repeated predictions are considered false positives , And will be punished in the prediction process , Therefore need NMS To eliminate these duplicate predictions . say concretely , For each category , Sort the prediction box according to the confidence score , And select the box with the highest score . Write it down as M. And then calculate M With other boxes IoU value , If IoU The value is greater than the preset threshold , Then these bounding boxes will be removed , The corresponding confidence score will also be reset to 0. Repeat this process for all prediction results .
 However , If the target happens to exist in M Of Ω within ,NMS It will cause the prediction to be lost , This situation is very common in cluster object detection . One solution to this problem is Soft-NMS. It will not directly eliminate B, It's going to be B The confidence decay of is its relationship with M Overlapping continuous functions F(F It can be a linear function or a Gaussian function ), as follows :
However , If the target happens to exist in M Of Ω within ,NMS It will cause the prediction to be lost , This situation is very common in cluster object detection . One solution to this problem is Soft-NMS. It will not directly eliminate B, It's going to be B The confidence decay of is its relationship with M Overlapping continuous functions F(F It can be a linear function or a Gaussian function ), as follows :

2. Model acceleration
(1) Calculation of shared characteristic graph : In different stages of the target detector , Feature extraction is usually dominant . For sliding window based detectors , Computational redundancy starts with location and scale . The former is caused by the overlap between adjacent windows , The latter is caused by the feature correlation between adjacent scales .
- Redundancy and acceleration of spatial computing : The most common method to reduce the redundancy of spatial computation is the shared computation of characteristic graphs , That is, before sliding the window , Calculate the feature map only once for the whole image . for example , In order to speed up HOG Speed of pedestrian detector , Researchers usually accumulate the entire input image HOG chart , As shown in the figure below :

However , The disadvantages of this method are also obvious , That is, the resolution of the feature map will be affected cell Size limit . If a small object lies between two cell Between , It may be ignored .
The idea of characteristic graph sharing computation is also widely used in convolution detectors . Most are based on CNN The detector , Such as SPPNET、Fast R-CNN And others have applied similar ideas , It achieves tens or even hundreds of times acceleration .
- Redundancy and acceleration of proportional calculation : In order to reduce the redundancy of proportional calculation , The most successful method is to scale features directly instead of images . However , Due to the fuzzy effect , Such a method cannot be directly applied to things like HOG Such features . For this question , Researchers found through extensive statistics and analysis HOG The strong correlation between the adjacent scale of and the characteristics of the integral channel . This correlation can speed up the calculation of feature pyramid by approximating the feature map of adjacent scales . Besides , structure “ Detector pyramid ” It is another method to avoid proportional redundancy calculation , That is, simply slide multiple detectors on a feature map to detect objects of different scales , Instead of rescaling images or features .
(2) Network pruning and quantification : “ Network pruning ” perhaps “ Network quantification ” It's acceleration CNN Two common techniques of model , The former refers to pruning the network structure or weight to reduce its size , The latter refers to the length of code that reduces activation or weight .
- Network pruning : The research of network pruning was first carried out with a method called “ Best brain injury ” Method to compress the parameters of multilayer perceptron network . In this method , The loss function of the network is approximated by taking the second derivative , In order to remove some unimportant weights . According to this idea , In recent years, the network pruning method adopts the process of iterative training and pruning , That is, after each training stage , Remove a small number of unimportant weights , Repeat these operations . Because traditional network pruning only removes unimportant weights , This may lead to sparse connection patterns in convolution filters , Therefore, it cannot be directly applied to compression CNN Model . A simple solution to this problem is to delete the entire filter , Instead of independent weights .
- Network quantification : Recently, the work on network quantization mainly focuses on network binarization , Its purpose is to quantify its activation or weight into binary variables (0/1) To speed up the network , Thus, the floating-point operation is converted into and 、 or 、 Unequal logic operation . Network binarization can significantly speed up computation and reduce network storage , So it is easier to deploy on mobile devices . A possible implementation of the above idea is to use the least square method to approximate convolution through binary variables . A more accurate approximation can be obtained by using a linear combination of multiple binary convolutions .
(3) Lightweight network design : The last group accelerates CNN The method of detector is to design lightweight network , Instead of using an existing detection engine . For a long time , Researchers have been exploring the correct configuration of the network , In order to obtain higher accuracy in limited time . In addition to some general design principles , Such as fewer channels and more layers , In recent years, some other methods have been proposed , We will introduce .

- Factorization convolution : The method is to build lightweight CNN The easiest way , There are two decomposition methods .
The first method is to decompose the large convolution filter into a group of small convolution filters in its spatial dimension , Pictured 14(b) Shown . for example , Can be 7×7 The filter is decomposed into 3 individual 3×3 filter , They share the same receptive field , But the latter is more effective . Another example is to put k×k The filter is decomposed into k×1 and 1×k filter , This is very effective for very large filters , At present, it has been applied to the field of target detection .
The second method is to divide a group of large convolutions into two groups in the channel dimension , Pictured 14(c) Shown . for example , We can use one c Characteristic diagram and d A filter simulates a convolution , It can be broken down into d' A filter 、 A nonlinear activation layer and another d A filter (d'<d).
- Grouping convolution : The purpose of grouping convolution is to divide the characteristic channels into different groups to reduce the number of parameters in the convolution layer , Then convolute independently on each group , Pictured 14(d) Shown . If we divide the characteristic channel into m Group , Without changing other configurations , The computational complexity of convolution will be reduced to the previous 1/m.
- Depth independent convolution : Pictured 14(e) Shown , Deep separable convolution is to build lightweight CNN A popular method of . When the number of groups is set to the number of channels , It can be regarded as a special case of block convolution . Suppose we have a d Convolution layers of filters and c Characteristic diagram of the channel . The size of each filter is k×k. For depth separable convolution , Every k×k×c The filter of is first divided into c A slice , The size of each slice is k×k×1, Then convolution is performed separately in each same channel using each slice of the filter . Finally, use multiple 1×1 The filter performs dimensional conversion , In order to finally output the required d passageway .
- Bottleneck design : Compared with the previous layers , The bottleneck layer of neural network contains fewer nodes . It can be used to learn effective data coding of dimension reduction input , This has been widely used in depth automatic encoder . In recent years , Bottleneck design is widely used in designing lightweight Networks . In these methods , A common method is to compress the input layer of the detector , So that the amount of calculation is reduced from the beginning of detection . Another method is to compress the output of the detection engine to make the feature map thinner , So that it is more effective in the subsequent detection stage .
(4) Numerical acceleration
- Accelerate with integral image :
Image integration is an important method in image processing . It helps to quickly calculate the sum on the image sub region . The essence of image integration is the separability of convolution integral and differential in signal processing :

among , If dg(x)/dx It's a sparse signal , Then the convolution can be accelerated by the right part of the equation .
besides , Image integration can also be used to accelerate more general features in target detection , For example, color histogram 、 Gradient histogram, etc . A typical example is by calculating integral HOG Figure to accelerate HOG. integral HOG The image does not accumulate pixel values in a traditional integral image , Instead, accumulate gradient directions in the image . As shown in the figure below :

Because you can cell The histogram in is regarded as the sum of gradient vectors in a specific region , So by using the integral image , With constant computing overhead , Calculate the histogram of rectangular area at any position and size .
- Frequency domain acceleration
Convolution can be accelerated in many ways , Among them, Fourier transform is a very practical choice . The theoretical basis of frequency domain accelerated convolution is the convolution theorem in signal processing , That is, under appropriate conditions , The Fourier transform of convolution of two signals makes the dot product in Fourier space . as follows :

among ,F It's Fourier transform ,F^-1 It's the inverse Fourier transform ,I and W They are input image and filter ,* For convolution operations , The right centered circle is a dot product operation . In the field of target detection , We can use the following figure to show this acceleration process .

- Vector quantization
Vector quantization is a classical quantization method in signal processing , It aims to simulate the distribution of big data through a group of small raw vectors . It can be used for data compression and accelerating the inner product operation in target detection . for example , Use vector quantization , Can be HOG Histograms are grouped and quantized into a set of original histogram vectors . Then in the detection phase , The inner product between the feature vector and the detection weight is realized by looking up the table . Because there is no floating-point multiplication and division in this process , The detection speed of the detector is increased by an order of magnitude .
- Reduced rank estimation
In deep networks , The full connection layer is essentially the multiplication of two matrices . When the parameter matrix W more , The computational burden of the detector will be heavy . Reduced rank estimation is a method of accelerating matrix multiplication , The aim is to W Perform low rank decomposition :

边栏推荐
- Tensorflow Einstein function
- QoS quality of service three DiffServ Model message marking and PHB
- Paper reading: hardnet: a low memory traffic network
- The function of extern, static, register, volatile keywords in C language; Nanny level teaching!
- Empty cup mentality, start again
- Love yourself first, then others.
- 研究会2022.07.22--对比学习
- "Big factory interview" JVM Chapter 21 questions and answers
- 单场GMV翻了100倍,冷门品牌崛起背后的“通用法则”是什么?
- /etc/rc. Local setting UI program startup and self startup
猜你喜欢

Take you to learn C step by step (second)

Blockbuster live broadcast | orb-slam3 series code explanation map points (topic 2)

17. What is the situation of using ArrayList or LinkedList?

"Big factory interview" JVM Chapter 21 questions and answers

Paper reading: hardnet: a low memory traffic network

项目上线就炸,这谁受得了

Penetration learning - SQL injection - shooting range - installation and bypass experiment of safety dog (it will be updated later)

【LeetCode】11. 盛最多水的容器 - Go 语言题解

C language to achieve three chess? Gobang? No, it's n-chess
Chapter007-FPGA学习之IIC总线EEPROM读取
随机推荐
Gimp custom screenshot
PyTorch 深度学习实践 第10讲/作业(Basic CNN)
C language to achieve three chess? Gobang? No, it's n-chess
【LeetCode】11. 盛最多水的容器 - Go 语言题解
安全工具之hackingtool
Penetration learning - SQL injection - shooting range - installation and bypass experiment of safety dog (it will be updated later)
记账APP:小哈记账2——注册页面的制作
Vs debugging
libsvm 使用参数的基础知识笔记(1)
5. Template cache. Drawing a square can only move within the triangle
SPI - send 16 bit and 8-bit data
avaScript的流程控制语句
Libevent multithreaded server + client source code
[C language] operator details (in-depth understanding + sorting and classification)
Mongodb application scenario and model selection (massive data storage model selection)
2D目标检测综述之学习策略篇(终章)
研究会2022.07.22--对比学习
8. Use the quadratic geometry technology to draw a small column on the screen.
Huawei experts' self statement: how to become an excellent engineer
单场GMV翻了100倍,冷门品牌崛起背后的“通用法则”是什么?