当前位置:网站首页>[Hongke case] how can 3D data become operable information Object detection and tracking
[Hongke case] how can 3D data become operable information Object detection and tracking
2022-06-24 00:17:00 【Intelligent perception_ hongke】

The basis for implementing the application project based on lidar is from 3D Extract information from point cloud data . in the majority of cases , This information begins with the detection and tracking of objects . This article will share the principle with you .
Laser radar The data shows “ Point cloud ”, This is a kind of Very intuitive Express . It is the sensor that captures precision 3D Environmental Science Images , its 3D Features allow you to Let us View the scene from different angles Point cloud . These data provide a lot of information , The application scenarios are very rich , From people Flow count To volume measurement and then to Security and other fields have relevant applications . At first glance , People don't find the necessary information in the beautiful point cloud , But algorithms can explain them well

Generally speaking , To use raw lidar data , The user must know how to handle 3D data . In order to facilitate customer development , Reduce the difficulty of application , We have developed a software product , Operational information can be extracted from the data generated by lidar . This software is simple and intuitive to use , Support traffic count analysis 、 Application in the field of security detection or volume measurement .
adopt Object detection and tracking records tourists Walking path
Imagine a square , There is a street carnival going on . There are... In the square Various stalls , Used to sell products 、 Food and drink . Organizers want to know how visitors move around the square . Based on this information , What can they evaluate place It is a good choice for sales booth , Which products are particularly popular . Help to understand their store How attractive the look is and whether they should optimize it , also The organizer was provided with information on how to price the booth according to the passenger flow .
Distinguish between background and foreground to reduce data transmission
Record the activities of tourists during the festival route , They need to be detected in the point cloud . The point cloud itself consists of 3D The entire scanning environment in the point consists of , It means that you need to tourists Separate from all other objects .
Because the object to be detected in our example is people walking around the square , So by testing Move Points distinguish them from other objects . This is not necessary for object detection , But it reduces the amount of data to transmit , So in many cases it's an advantage , Objects can also be detected in a completely static point cloud .
By reference recording at the beginning of the measurement cycle , Detect moving points in the point cloud . Everything visible and not moved in this record is defined as background . This can be filtered out , Thus, the amount of data to be transmitted is greatly reduced . In the interior , This process is usually enough , Because it can be assumed that the background will not change . In order to consider the future changes of the background ( for example , A market stall leaves ), It is constantly identified and updated during operation , And dynamically subtract the background . This is done by adding objects that do not move within a predefined period of time to the background .
https://v.youku.com/v_show/id_XNTg3OTk4MTI0OA==.html
Which points belong to an object ?
Once object detection is subtracted from the point cloud by deleting the background Not interested in everything , The rest is the future , So that's the object . They are through “ clustering ” or Division To define the : Detect moving points in the point cloud , And measure the distance between several points . Points close to each other converge into an object . This process is exactly the same in a static point cloud where the object does not move .
Object use Bounding box Mark and Show In the object list . This type of information is easy to process further , And it can be easily integrated into the existing architecture . Setting certain rules for the size and shape of objects can identify the type of objects . In our example , If a person is detected , Then only cylindrical objects within a certain height range are counted and marked as people . Again , Cars can also be detected by establishing specific parameters .
https://v.youku.com/v_show/id_XNTg3OTk4NDU2NA==.html
How objects move ?
To capture tourists Walking path , Based on the previous trajectory of the object and the probability model, predict the position of the object to be located in the next frame track Detected object . for example , If a person walks from left to right at a speed of one meter per second , It is expected that he or she will continue to move in the given direction at the same speed , And will be at a specific location in the next frame . Then, the object detected in the next frame is assigned to the object based on motion prediction , To track .
https://v.youku.com/v_show/id_XNTg3OTk4Mjk0NA==.html
Thermogram
By recording the walking path of visitors , Analyze the situation of each booth and create “ Thermogram ”. It shows which places attract the most tourists , The most popular . For the next event , Organizers may consider using this information for location allocation .
for example , Heat map at trade show Also very useful in . By recording visitors at the booth and analyzing their routes , Laser radar The sensor can clearly identify the exhibits of special interest to visitors . During the event , This information may lead to changes in staffing and even booth design , It can be incorporated into the subsequent booth planning .

further application The basis of
Object detection and tracking is a further step in analyzing point cloud application The basis of , Support A lot of scenes , for example Visitors flowrate Statistics 、 Occupancy detection or invasion testing . In the second part of this series , You will learn how these algorithms work 、 Application example , See you next time .
边栏推荐
- [image detection saliency map] calculation of fish eye saliency map based on MATLAB distortion prompt [including Matlab source code 1903]
- DO280OpenShift访问控制--管理项目和账户
- [digital signal] spectrum refinement based on MATLAB analog window function [including Matlab source code 1906]
- 小猫爪:PMSM之FOC控制15-MRAS法
- Chinese guide to accompanist component library - glide, hot
- 如何利用數倉創建時序錶
- Using anydesk remote control for intranet penetration horizontal movement
- [traffic light identification] traffic light identification based on Matlab GUI [including Matlab source code 1908]
- 解决base64压缩文件,经过post请求解压出来是空格的问题
- Throttling and anti shake
猜你喜欢
Dependency Inversion Principle

I was cheated by my colleagues to work overtime on weekends. I haven't seen redis used like this...

医疗是什么?AI医疗概念解析AI

Accompanist组件库中文指南 - Glide篇,劲爆

AI技术在医学领域有什么用?

Do280openshift access control -- manage projects and accounts
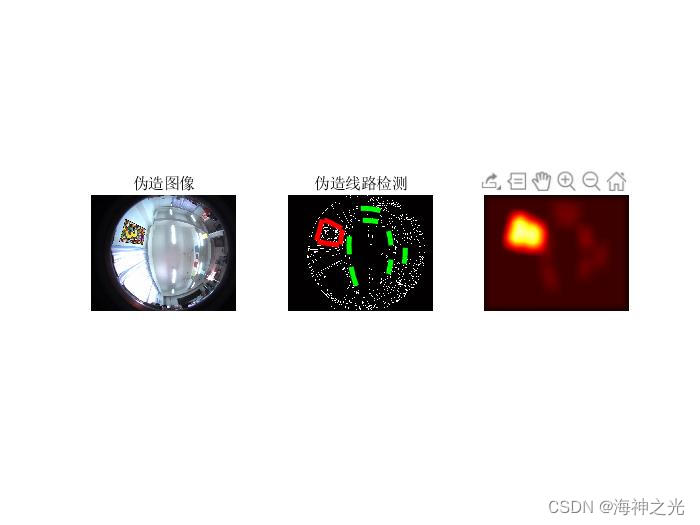
【图像检测显著图】基于matlab失真提示鱼眼图显著图计算【含Matlab源码 1903期】

【FreeRTOS】07 二值信号量、计数信号量

数字化工厂可以分为哪两类

Andorid 开发艺术探索笔记(2),跨平台小程序开发框架
随机推荐
All 32 keyword classifications of C language C89 (C90)
规律/原理/规则/法则/定理/公理/本质/定律
Confused test / development programmers, different people have different stories and different puzzles
合成大西瓜小游戏微信小程序源码/微信游戏小程序源码
Index principle and filling factor in database
社招面试必不可少——《1000 道互联网大厂 Android工程师面试题》
[image detection saliency map] calculation of fish eye saliency map based on MATLAB distortion prompt [including Matlab source code 1903]
New function of lightweight application server: simple experience of offline business migration by using image sharing
【图像检测显著图】基于matlab失真提示鱼眼图显著图计算【含Matlab源码 1903期】
[digital signal] spectrum refinement based on MATLAB analog window function [including Matlab source code 1906]
医疗是什么?AI医疗概念解析AI
UART protocol timing summary
What are the two types of digital factories
Learn PWN from CTF wiki - ret2text
Complete collection of development environment configuration -- Visual Studio 2022 installation
js 语言 精度问题
Principles and differences between hash and history
C语言:关于矩阵右移问题
【面试经验包】面试被吊打经验总结(一)
使用递归形成多级目录树结构,附带可能是全网最详细注释。