当前位置:网站首页>网络基础和框架
网络基础和框架
2022-06-23 12:02:00 【大老婆灰原哀】
网络
1.网络运行机制
//数字货币,区块链,去中心化,人机验证
//域名解析 谷歌8.8.8.8 中国114.114.114.114
2.TCP/IP协议

![]()

![]()
![]()
3.IP格式、TCP格式、UDP格式
IP
![]()
TCP头部

4.TCP严谨格式,链接时三次握手,结束时四次挥手。

三次握手

四次挥手

UDP无连接,不可靠,但是传输效率高。

5.套接字机制-Socket(插座)——网络连接机制

异步收发消息(有一种Ajax线程)

套接字
边栏推荐
- 20年上海站D题Walker(二分,简洁)
- 并购增资或将有望启动东软越通新动能?
- 2022施工员-装饰方向-岗位技能(施工员)操作证考试题库模拟考试平台操作
- Qt5 knowledge: DNS query
- 冷板式、浸没式、喷淋式液冷散热能否引领高性能计算发展?
- ROS observation [57]: configure arm robots to grasp things
- Analysis of six dimensional chart: analysis of enterprise growth of CSCEC
- 运行时应用自我保护(RASP):应用安全的自我修养
- 【基础知识】~ 数据位宽转换器
- Go 语言使用 MySQL 的常见故障分析和应对方法
猜你喜欢

Huawei cloud gaussdb heavily released HTAP for commercial use, defining a new paradigm of cloud native database 2.0
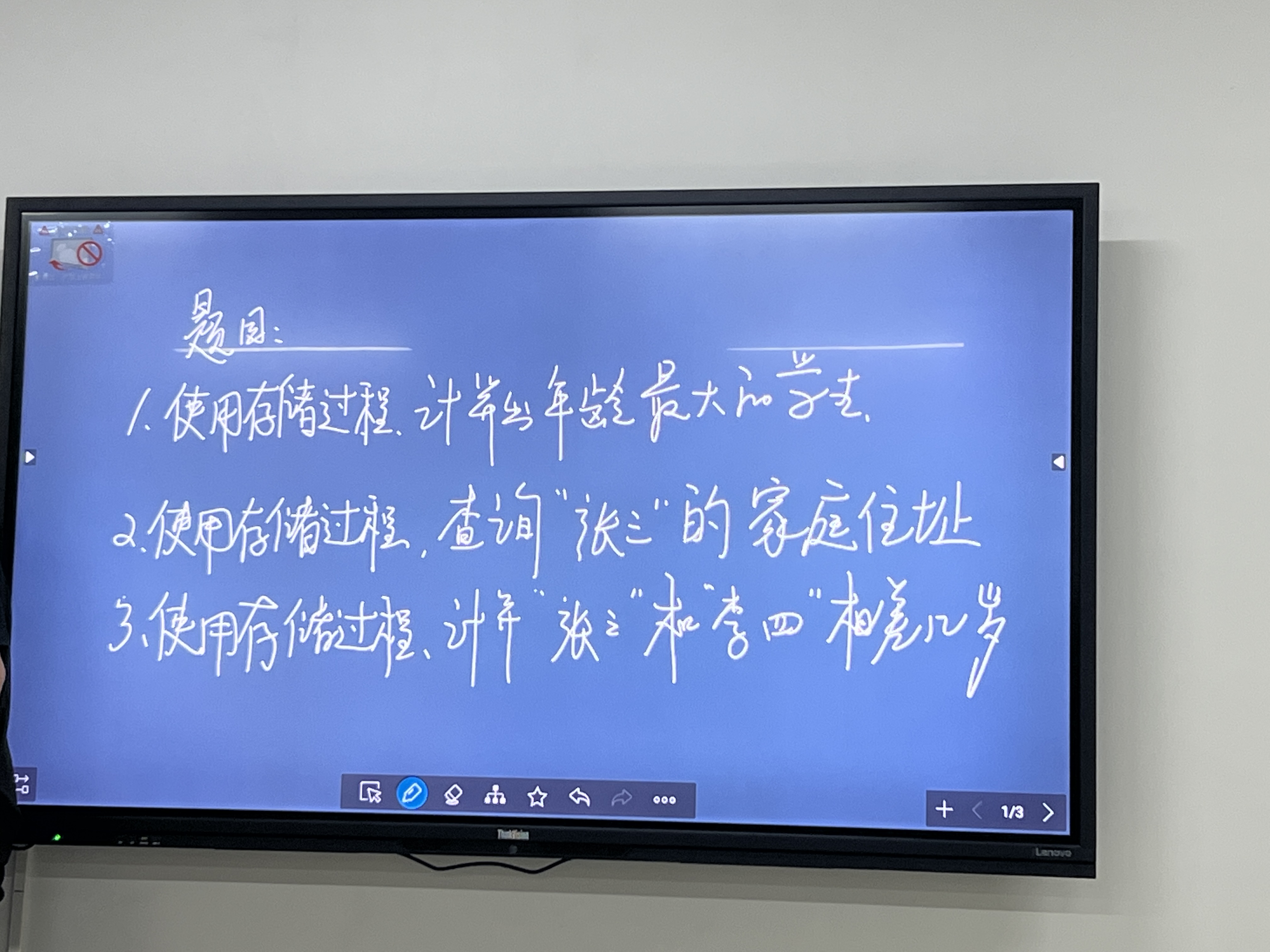
Mysql, how to calculate the maximum value using stored procedures

Qt 知识:使用 QGraphicsPixmapItem类
ROS2知识(1):开始实践机器人
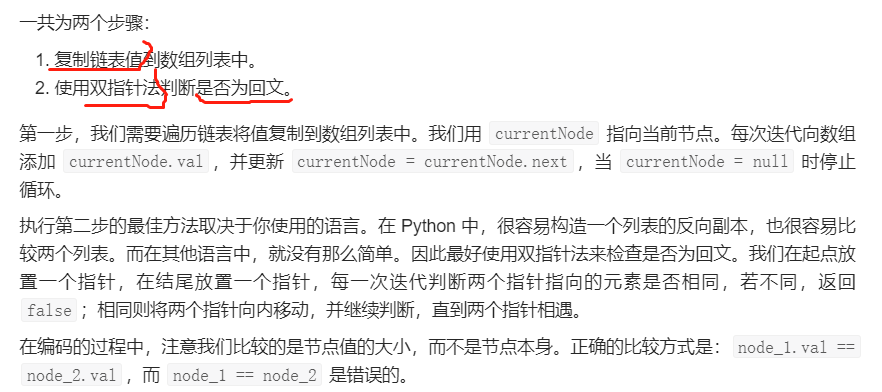
链表5 - 234. 回文链表

Learning notes sweep crawler framework

Introduction to redis - Chapter 1 - data structures and objects - simple dynamic string (SDS)
二維激光SLAM( 使用Laser Scan Matcher )
![[processes and threads]](/img/6b/ff1076a3809ecc412f2bf6517c278e.png)
[processes and threads]
2D laser Slam (using laser scan matcher)
随机推荐
ROS observation [51]: how to integrate odometer and IMU with robots_ Localization convergence
【综合笔试题】30. 串联所有单词的子串
二维激光SLAM( 使用Laser Scan Matcher )
想学习eTS开发?教你开发一款IQ-EQ测试应用
群晖万兆网络配置与测试
09 -- 回文对
Slam Laser 2D (en utilisant Laser Scan matcher)
Proof and application of Chebyshev inequality
2022工具钳工(初级)考试练习题模拟考试平台操作
QT5知识:DNS查询
mysql innodb的redo log buffer中未commit的事务持久化到redo log后,万一事务rollback了怎么办?
理财产品的赎回时间有规定吗?
[processes and threads]
Halcon knowledge: dyn_ Usage of threshold (scratch detection)
国产化信息 | 爱可生与中科方德完成产品兼容互认证
得物多活架构设计之路由服务设计
ROS察微【51】:如何将里程计和 IMU 与 robots_localization 融合
ROS知识:读取点云数据文件
Halcon principle: Auto_ Threshold operator
With 32 qubits! Rigetti computing enters the UK quantum computing market