当前位置:网站首页>[don't bother to strengthen learning] video notes (IV) 2. Dqn realizes maze walking
[don't bother to strengthen learning] video notes (IV) 2. Dqn realizes maze walking
2022-07-24 09:16:00 【Your sister Xuan】
The first 11 section DQN Realize the maze ——《 Strengthen learning notes 》
In the previous section, we have introduced in detail DQN The two sharp weapons of :REPLAY BUFFER( Empirical playback mechanism ) and frozen Q-target( Target network , Two networks are used to estimate the truth Q Value network ), Here is given DQN The pseudo code , Convenient for later programming .
11.1 Main circulation
DQN The pseudocode is as follows :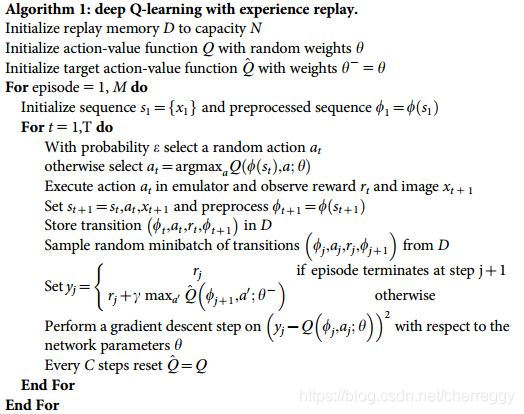
The main code of the main loop is the above update process , Other things like DQN Class and other codes are supplemented later . The main loop should pay attention to , Here are two networks and REPLAY BUFFER Usefulness , Is to cut off the correlation between Markov sequence elements .
For the preparation of the network 、 The main function of network parameter update is not considered , Intermediate storage to REPLAY BUFFER The following content belongs to learning Q Content of the network , All in DQN Class learn Function .
Here we also add the drawing function of neural network error dotted line , If you can , You can also modify the code , Output all of the two networks LOSS Changes .
from maze_env import Maze
from DQN import DeepQNetwork
def run_maze():
step = 0 # Record the steps , It is used to prompt the time of learning
for episode in range(300):
# Initialization environment
observation = env.reset()
while True:
env.render() # Render a frame of environment
action = RL.choose_action(observation) # DQN According to the current state s Choose behavior a
observation_, reward, done = env.step(action) # Interact with the environment , Get the next status s'、 Reward R And whether it reaches the final state
RL.store_transition(observation, action, reward, observation_) # Store the current sampling sequence in RF in (s, a, R, s')
# 200 Start learning after step , every other 5 Step by step , to update Q Network parameters ( The first network )
if (step > 200) and (step % 5 == 0):
RL.learn()
observation = observation_ # Move to the next state
if done: # If terminated , Just jump out of the loop
break
step += 1 # Total steps + 1
# Game over
print('game over')
env.destroy()
if __name__ == "__main__":
env = Maze() # Create an environment
RL = DeepQNetwork(env.n_actions, env.n_features,
learning_rate=0.01,
reward_decay=0.9,
e_greedy=0.9,
replace_target_iter=200, # Every time 200 Step change once target_net Parameters of
memory_size=2000, # Memory limit
# output_graph=True # Whether the output tensorboard file
)
env.after(100, run_maze)
env.mainloop()
RL.plot_cost() # Error curve of neural network
11.2 DeepQNetwork class
DQN And Q Learning and SARSA There's a big difference , The code of the main class contains Parameter initialization 、 Creating networks 、 Store memory 、 Choose action 、 Study and Draw the learning curve These modules .
Parameter initialization
The specific parameter meanings are in the code comments .
import tensorflow as tf
import numpy as np
class DeepQNetwork:
def __init__(
self,
n_actions,
n_features,
learning_rate=0.01,
reward_decay=0.9,
e_greedy=0.9,
replace_target_iter=300,
memory_size=500,
batch_size=48,
e_greedy_increment=None,
output_graph=False,
):
self.n_actions = n_actions # Action space , There are several movements
self.n_features = n_features # The dimensions of characteristics , For example, the maze is the position in the maze (length, height), Image words may be (m*n) Size picture
self.lr = learning_rate # Learning rate , Parameter update efficiency
self.gamma = reward_decay # Reward decay factor
self.epsilon_max = e_greedy # epsilon-greedy Parameters of , The larger the number, the smaller the randomness
self.replace_target_iter = replace_target_iter # Update the target network every few steps ( The second network )
self.memory_size = memory_size # Memory limit
self.batch_size = batch_size # Every update from buffer The number of memories taken out
self.epsilon_increment = e_greedy_increment # epsilon The value of increases with time , That is, the randomness decreases , Explore mode parameters
self.epsilon = 0 if e_greedy_increment is not None else self.epsilon_max # Whether to turn on discovery mode ,
# And gradually reduce the number of explorations ,epsilon by 0 The proof is completely random at first
self.learn_step_counter = 0 # Record the number of learning steps , To update the target network parameters
# Initialize all 0 memory [s, a, r, s_]
self.memory = np.zeros((self.memory_size, n_features * 2 + 2)) # *2 It means observed value ( state ) It's two-dimensional ( coordinate )
self._build_net() # establish Q Network and target network
# Replace target net Parameters of
t_params = tf.get_collection('target_net_params') # Extract the parameters of the target network
e_params = tf.get_collection('eval_net_params') # extract Q Network parameters
self.replace_target_op = [tf.assign(t, e) for t, e in zip(t_params, e_params)] # Update target network parameters
self.sess = tf.Session()
# Output log file
if output_graph:
# $ tensorboard --logdir=logs Input mode of command line , see tensor board command
tf.summary.FileWriter("logs/", self.sess.graph)
self.sess.run(tf.global_variables_initializer()) # Initialize global parameters
self.cost_his = [] # Record all loss, For final drawing
Notice the top Q The Internet It refers to sampling and from buffer Generated when taking out memory Q Value network ( abbreviation Network one ), Target network It refers to the estimation of truth in learning update Q value , Networks that update slower than the former ( abbreviation Network II ), Two networks The structure is exactly the same , But the parameter update step of the second network is larger ( Assign network one parameter to network two at regular intervals ).
Creating networks
There are some difficulties in the code of network creation , Need to use tensor flow, Here is only a simple description and code , Other parts will not be explained in detail . The specific structure of the network can be found in tensor board View in ,tensorboard Usage method :Tensorboard The use of,
Specifically about the network structure and Tensorboard For visual results, please look down the article .
def _build_net(self):
# ------------------ establish Q The Internet ------------------
self.s = tf.placeholder(tf.float32, [None, self.n_features], name='s') # Input status s
self.q_target = tf.placeholder(tf.float32, [None, self.n_actions], name='Q_target') # Used to store the target Q value
with tf.variable_scope('eval_net'):
# c_names: A collection of storage parameters
c_names, n_l1, w_initializer, b_initializer = \
['eval_net_params', tf.GraphKeys.GLOBAL_VARIABLES], 10, \
tf.random_normal_initializer(0., 0.3), tf.constant_initializer(0.1) # Parameter initializer
# first floor , Linear polynomial , Parameters are used when copying to the target network
with tf.variable_scope('l1'):
w1 = tf.get_variable('w1', [self.n_features, n_l1], initializer=w_initializer, collections=c_names)
b1 = tf.get_variable('b1', [1, n_l1], initializer=b_initializer, collections=c_names)
l1 = tf.nn.relu(tf.matmul(self.s, w1) + b1)
# The second floor
with tf.variable_scope('l2'):
w2 = tf.get_variable('w2', [n_l1, self.n_actions], initializer=w_initializer, collections=c_names)
b2 = tf.get_variable('b2', [1, self.n_actions], initializer=b_initializer, collections=c_names)
self.q_eval = tf.matmul(l1, w2) + b2
with tf.variable_scope('loss'):
self.loss = tf.reduce_mean(tf.squared_difference(self.q_target, self.q_eval))
with tf.variable_scope('train'):
self._train_op = tf.train.RMSPropOptimizer(self.lr).minimize(self.loss)
# ------------------ Build the target network , and Q The network is exactly the same ------------------
self.s_ = tf.placeholder(tf.float32, [None, self.n_features], name='s_') # Input
with tf.variable_scope('target_net'):
c_names = ['target_net_params', tf.GraphKeys.GLOBAL_VARIABLES]
# first floor
with tf.variable_scope('l1'):
w1 = tf.get_variable('w1', [self.n_features, n_l1], initializer=w_initializer, collections=c_names)
b1 = tf.get_variable('b1', [1, n_l1], initializer=b_initializer, collections=c_names)
l1 = tf.nn.relu(tf.matmul(self.s_, w1) + b1)
# The second floor
with tf.variable_scope('l2'):
w2 = tf.get_variable('w2', [n_l1, self.n_actions], initializer=w_initializer, collections=c_names)
b2 = tf.get_variable('b2', [1, self.n_actions], initializer=b_initializer, collections=c_names)
self.q_next = tf.matmul(l1, w2) + b2
Store memory
here REPLAY BUFFER The size of is fixed , The variables above memory_size Namely buffer Size , The index loop points to each row , The new memory will cover the old one .
def store_transition(self, s, a, r, s_):
if not hasattr(self, 'memory_counter'): # Check whether the variable exists
self.memory_counter = 0 # Record the total number of memories
# Record a [s, a, r, s_] Record
transition = np.hstack((s, [a, r], s_)) # Become a horizontal vector
# total memory The size is fixed , If it exceeds the total size , used memory By the new memory Replace
index = self.memory_counter % self.memory_size # Similar to a circular array , Take the remainder and place it circularly , Cover the previous content
self.memory[index, :] = transition # Place memory
self.memory_counter += 1 # Number of memory strips +1
Action selection
First enter Q The network gets all the action Q value , according to ϵ \epsilon ϵ-Greedy Select action index output .
def choose_action(self, observation):
# stay observation Add a dimension before (1, size_of_observation), For convenience tensor flow Handle
observation = observation[np.newaxis, :]
if np.random.uniform() < self.epsilon: # epsilon Probability of greedy choice
actions_value = self.sess.run(self.q_eval, feed_dict={
self.s: observation}) # Input status , Output the corresponding Q value
action = np.argmax(actions_value) # Choose the largest action
else:
action = np.random.randint(0, self.n_actions) # Random selection
return action
Study
Here's the key code , Corresponding to the pseudo code flow above .
- First, through ϵ \epsilon ϵ-Greedy Get the action a, Interaction with the environment is rewarded R And the next state s’. Put this experience sequence ( s , a , R , s ′ , e n d ? ) (s,a,R,s',end?) (s,a,R,s′,end?) Put in buffer in , among e n d ? end? end? Indicates whether it is the final state .
- When updating the network , from buffer Take out a batch of experience sequence , First put it s ′ s' s′ Input to Q The network gets the predicted action Q Value corresponds to the maximum action , That is... In the code m a x a ′ Q ^ ( ϕ j + 1 , a ′ ; θ − ) max_{a'}\hat{Q}(\phi_{j+1},a';\theta^-) maxa′Q^(ϕj+1,a′;θ−). Multiplied by γ \gamma γ( Attenuation coefficient ) add r( Reward ) Estimated True value .
- Then put the corresponding state s s s And the action a a a Input to Q Get in the network Estimated value .
- True value and Estimated value Do a bad job and get LOSS, Use LOSS Update the gradient descent method Q Network parameters
- Update every certain step Target network
def learn(self):
# Reaching a certain number of steps will Q The parameters of the network are copied to the target network
if self.learn_step_counter % self.replace_target_iter == 0:
self.sess.run(self.replace_target_op)
print('\ntarget_params_replaced\n')
# from buffer(memory) Randomly selected from batch_size Memory of size
if self.memory_counter > self.memory_size: # exceed buffer The size selection range is buffer Size
sample_index = np.random.choice(self.memory_size, size=self.batch_size) # Otherwise, it is the size of the number of existing memory , Avoid extracting empty memories into
else:
sample_index = np.random.choice(self.memory_counter, size=self.batch_size)
batch_memory = self.memory[sample_index, :] # Get a batch of memory to update the network
# obtain q_next ( The target network generates ) and q_eval(Q Network generation )
q_next, q_eval = self.sess.run(
[self.q_next, self.q_eval],
feed_dict={
self.s_: batch_memory[:, -self.n_features:],
self.s: batch_memory[:, :self.n_features]
})
# The following steps are very important . q_next, q_eval Contains all the action Value ,
# And all we need is what we have chosen action Value , Others don't need .
# So we're going to other action All values become 0, Will be used action Error value Reverse pass back , As update credentials .
# This is what we finally want to achieve , such as q_target - q_eval = [1, 0, 0] - [-1, 0, 0] = [2, 0, 0]
# q_eval = [-1, 0, 0] It means that I have chosen... In this memory action 0, and action 0 It brings Q(s, a0) = -1, So the others Q(s, a1) = Q(s, a2) = 0.
# q_target = [1, 0, 0] It means... In this memory r+gamma*maxQ(s_) = 1, And no matter in s_ Which one did we take last time action,
# We all need to correspond to q_eval Medium action Location , So I will 1 On the action 0 The location of .
# The following is also to achieve the above purpose , But in order to make the program operate more , The process of achieving the goal is a little different .
# Yes, it will q_eval Assign all values to q_target, At this time q_target-q_eval All for 0,
# however Let's go back to batch_memory In the middle of action This column Here it is q_target The corresponding of memory-action Position to modify the assignment .
# Make the new assignment reward + gamma * maxQ(s_), such q_target-q_eval Can become what we need .
# There is another example below .
q_target = q_eval.copy()
batch_index = np.arange(self.batch_size, dtype=np.int32)
eval_act_index = batch_memory[:, self.n_features].astype(int)
reward = batch_memory[:, self.n_features + 1]
q_target[batch_index, eval_act_index] = reward + self.gamma * np.max(q_next, axis=1)
""" If in this batch in , We have 2 An extracted memory , According to each memory, we can produce 3 individual action Value : q_eval = [[1, 2, 3], [4, 5, 6]] q_target = q_eval = [[1, 2, 3], [4, 5, 6]] And then according to memory The specific action Position to modify q_target Corresponding action Value on : For example : memory 0 Of q_target The calculated value is -1, And I used action 0; memory 1 Of q_target The calculated value is -2, And I used action 2: q_target = [[-1, 2, 3], [4, 5, -2]] therefore (q_target - q_eval) It becomes : [[(-1)-(1), 0, 0], [0, 0, (-2)-(6)]] Finally, we put this (q_target - q_eval) As an error , Back propagation neural network . All for 0 Of action The value was not chosen at that time action, There was a choice before action There is nothing to do 0 Value . We only reverse the previously selected action Value , """
# Training eval_net
_, self.cost = self.sess.run([self._train_op, self.loss],
feed_dict={
self.s: batch_memory[:, :self.n_features],
self.q_target: q_target})
self.cost_his.append(self.cost) # Record cost error
# Gradually increase epsilon, Reduce the randomness of behavior
self.epsilon = self.epsilon + self.epsilon_increment if self.epsilon < self.epsilon_max else self.epsilon_max
self.learn_step_counter += 1
Draw the learning curve
def plot_cost(self): # Visualize learning results
import matplotlib.pyplot as plt # Yes pyplot Visualization Library
plt.plot(np.arange(len(self.cost_his)), self.cost_his)
plt.ylabel('Cost')
plt.xlabel('training steps')
plt.show()
11.3 The operation effect is similar to tensorboard
have NVIDIA The graphics card can be used to run code , It's going to be a lot faster , Please find Baidu by yourself for specific methods . The following is the running interface effect :
If you are using PYCHARM, Then you can click on the console below terminal, Bring up the terminal , Input tensorboard --logdir logs, Show the following :
(base) F:\ Reinforcement learning \DQN>tensorboard --logdir logs
TensorBoard 1.14.0 at http:// Computer information number ( It's not convenient to give ):6006/ (Press CTRL+C to quit)
Open any browser , Address field input localhost:6006, Visit to see tensorboard Network structure diagram displayed on the interface : LOSS Change the following :
LOSS Change the following :
11.4 About dual networks and Replay Buffer The understanding of the
From the above network structure diagram, we can clearly see the following points :
- Q The Internet (eval_net) Input status s, Target network (target_net) Input status s’, Both outputs get LOSS
- Q The network will pass its parameter values to the target network
- Only Q The network is updating parameters
and Replay Buffer The existence of , It was also introduced before that the purpose is Weaken the correlation between time series , I drew a picture to show Replay Buffer The role and process of :
In fact, the fixed size storage space in the code can be used as Circular queue Use , The effect is to let the new memory cover the old memory . So how do batch memories update at the same time ? How does the dimension change ?
Here I also draw an image to show the dimensional changes in the process ( But the corresponding example in this figure is not a maze , It was written before Atari Examples of games , The input is the image , Of course, the network structure is also different ):
Of course , There are still many places worth exploring , For example, the structure of the network ( But the network structure is very complex , A wide range )、batch_size and replay buffer The impact of the size of on the running results , You can try it in code . You can also try other environments , stay OpenAI Gym There are many environments , Please refer to for specific usage :OpenAI gym Environment library
Last one :【 Don't bother to strengthen learning 】 Video notes ( Four )1. What is? DQN?
Next :【 Don't bother to strengthen learning 】 Video notes ( 5、 ... and )1. What is the strategic gradient ?
边栏推荐
- js定位大全获取节点的兄弟,父级,子级元素含robot实例
- Open source summer interview | learn with problems, Apache dolphin scheduler, Wang Fuzheng
- VGA character display based on FPGA
- Practice 4-6 number guessing game (15 points)
- TCP triple handshake connection combing
- 在npm上发布自己的库
- 来阿里一年后我迎来了第一次工作变动....
- The detailed process of building discuz forum is easy to understand
- Houdini notes
- Tongxin UOS developer account has supported uploading the HAP package format of Hongmeng application
猜你喜欢

Paclitaxel loaded tpgs reduced albumin nanoparticles /ga-hsa gambogic acid human serum protein nanoparticles

在npm上发布自己的库
![[translation] integration challenges in microservice architecture using grpc and rest](/img/88/53f4c2061b538b3201475ba51449ff.jpg)
[translation] integration challenges in microservice architecture using grpc and rest

Description of MATLAB functions

DP longest common subsequence detailed version (LCS)
Matlab各函数说明

Tiflash source code reading (V) deltatree storage engine design and implementation analysis - Part 2

Android system security - 5.3-apk V2 signature introduction

Run little turtle to test whether the ROS environment in the virtual machine is complete

Tang Yudi opencv background modeling
随机推荐
Tongxin UOS developer account has supported uploading the HAP package format of Hongmeng application
Android system security - 5.3-apk V2 signature introduction
Data center: started in Alibaba and started in Daas
Tiktok 16 popular categories, tiktok popular products to see which one you are suitable for?
Pulse netizens have a go interview question, can you answer it correctly?
Tiktok video traffic golden release time
Little dolphin "transformed" into a new intelligent scheduling engine, which can be explained in simple terms in the practical development and application of DDS
Promise basic summary
【汇编语言实战】(二)、编写一程序计算表达式w=v-(x+y+z-51)的值(含代码、过程截图)
Office fallback version, from 2021 to 2019
[assembly language practice] solve the unary quadratic equation ax2+bx+c=0 (including source code and process screenshots, parameters can be modified)
Leetcode question brushing series -- 174. Dungeon games
What is the component customization event we are talking about?
Code random notes_ Linked list_ Turn over the linked list in groups of 25K
VGA character display based on FPGA
科目1-3
The difference between classification and regression
Nuggets manufacturing industry, digital commerce cloud supply chain collaborative management system to achieve full chain intelligent management and control
Linked list - 19. Delete the penultimate node of the linked list
Vim: extend the semantic analysis function of YCM for the third-party library of C language