当前位置:网站首页>基于快速行进平方法的水面无人船路径规划
基于快速行进平方法的水面无人船路径规划
2022-08-05 06:05:00 【米朵儿技术屋】
摘要: 针对水面无人船控制系统中的重要组成部分之一的路径规划,本文基于快速行进平方法对其进行了研究.首先建立了路径评价函数,根据水面无人船所处的真实环境,对基于不同参数Sat规划所得路径的特征进行量化,从而选择适用于本海域的Sat值,以进行动态环境下路径规划的研究.之后,本文对快速行进平方法进行了适当改进,对路径规划过程进行了优化,当无人船没有碰撞危险时,仅使用快速行进平方法进行一次全局路径规划,而当无人船探测到障碍船只后,再利用快速行进平方法进行局部路径规划.并在此过程中对速度势场进行改良,人为加入不可航行区域,使得无人船沿局部路径航行时,可以做出符合国际海上避碰规则所规定的动态避碰行为.最后,通
边栏推荐
猜你喜欢








随机推荐
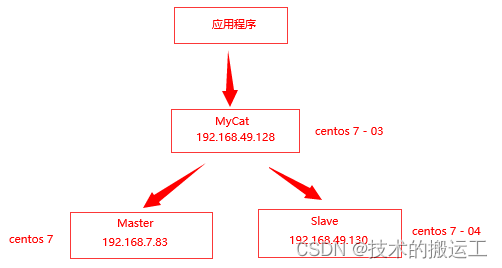
MySQL的主从模式搭建
FPGA解析B码----连载4
农场游戏果园系统+牧场养殖系统+广告联盟模式流量主游戏小程序APP V1
DevExpress中针对指定列进行百分比转换
Error correction notes for the book Image Processing, Analysis and Machine Vision
LaTeX uses frame to make PPT pictures without labels
2022杭电多校六 1007-Shinobu loves trip(同余方程)
【FAQ】CCAPI Compatible EOS Camera List (Updated in August 2022)
Unable to import torchvision. IO. Read_image
scikit-image图像处理笔记
技术分析模式(九)三重顶部和底部
LeetCode practice and self-comprehension record (1)
在STM32中使用printf函数
多行文本省略
无法导入torchvision.io.read_image
Redis的使用
Q 2020, the latest senior interview Laya soul, do you know?
单片机期末复习大题
HelloWorld
Come, come, let you understand how Cocos Creator reads and writes JSON files