当前位置:网站首页>机械臂速成小指南(三):机械臂的机械结构
机械臂速成小指南(三):机械臂的机械结构
2022-06-24 09:47:00 【躺躺我啊】
指南目录:

物质是基础,因此,要想搞明白机械臂怎么控制,你首先需要知道机械臂上面都有些什么东西,它们之间的关系是什么,即机械臂的机械结构和核心部件。
本章主要介绍机械臂的机械结构。
一、概述
机械臂的机械机构由一系列刚性构件(连杆)通过链接(关节)联结起来,机械手的特征在于具有用于保证可移动性的臂( arm ),提供灵活性的腕( wrist )和执行机器人所需完成
任务的末端执行器( end - effector )。
机械臂分为串联机械臂与并联机械臂。在指南中,我们主要研究的是串联机械臂。
 |  |
| 串联机械臂 | 并联机械臂 |
机械臂的运动能力由关节保证。两个相邻连杆的连接可以通过移动关节( prismatic joint)或旋转关节( revolute joint)实现。在一个开式运动链中,每一个移动关节或转动关节都为机械结构提供一个自由度( degrees of freedom , DOF )。移动关节可以实现两个连杆之间的相对平移,而旋转关节可以实现两个连杆之间的相对转动(旋转关节相较移动关节更为简捷可靠)。而在闭式运动链中,由于闭环带来的约束,自由度要少于关节数。
在机械臂上必须合理地沿机械结构配置自由度,以保证系统能够有足够的自由度来完成指定的任务。通常在三维空间里一项任意定位和定向的任务中需要6个自由度,其中3个自由度用于实现对目标点的定位,另外3个自由度用于实现在参考坐标系中对目标点的定向。如果系统可用的自由度超过任务中变量的个数,则从运动学角度而言,机械臂是冗余( redundant )的。
二、串联机械臂
在机械手中,臂的任务是满足腕的定位需求,进而由腕满足末端执行器的定向需求。从基关节开始,可以按臂的类型和顺序,将机械手分为笛卡儿型( Cartesian )、圆柱型( cylindrical )、
球型( spherical ), SCARA 型和拟人型( anthropomorphic )等。
 |  |
| a 笛卡尔型机械臂 | b 圆柱型机械臂 |
 |  |
| c 球型机械臂 | d SCARA型机械臂 |
1.笛卡尔机械臂
笛卡尔机械臂的几何构形由三个移动关节实现,其特点是它的三轴相互垂直(图1.2)。从几何观点看,每一个自由度对应于一个笛卡尔空间变量,因此在空间中能够很自然地完成直线运动。笛卡尔结构能提供很好的机械刚性。腕在工作空间中的定位精度上处处为常量。这就是由长方体构成的工作空间,如上图中图a所示。由于所有的关节都是移动关节,所以该结构精确性高,但灵活性较差。要对目标进行操纵,需要从侧面去接近目标。另一方面,如果想要从顶部靠近目标,笛卡尔机械手可以通过龙门架( gantry )结构实现,如下图所示。

笛卡儿机械臂常用于材料的抓取与装配。
2.圆柱型机械臂
圆柱型机械臂的机械结构与笛卡儿机械臂的区别在于第一个移动关节被旋转关节所替代。圆柱型结构提供了良好的机械刚度,其腕的定位精度有所降低,而水平方向的动作能力则有所提高。
圆柱型机械臂的工作空间是空心圆柱体的一部分。由于圆柱形机械臂拥有水平方向的移动关节,圆柱型机械臂的腕部适合操作水平方向的工件。
同时,圆柱型机械臂主要用于平稳地运送大型工件,在这种情况下使用液压驱动比使用电机驱动更合适。
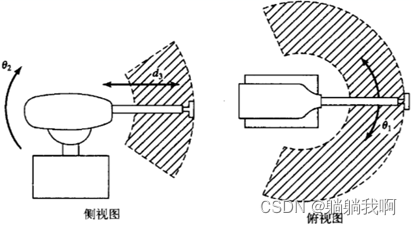
3.球型机械臂
球型机械臂的机械结构与圆柱型机械臂的区别在于第二个移动关节被旋转关节所替代。球型机械臂的机械强度低于笛卡尔机械臂与圆柱型机械臂,机械结构更为复杂。
球型机械臂的径向操作能力较强,其工作空间是一个中空的球型的一部分。
球型机械臂的关节通常由电机驱动。
4.SCARE机械臂
世界首款SCARE机械臂是日本山梨大学(University of Yamanashi)的牧野洋(Hiroshi Makino)于1978年研发所得的,SCARA是顺应性装配机器手臂(Selective Compliance Assembly Robot Arm)的英文缩写。
SCARE机械臂的特殊机械结构使得所有的运动轴都是平行的,这使得它拥有垂直方向作业的高度稳定性与水平方向装载的优越灵活性。
SCARE机械臂适合操纵较小的目标,关节由电机驱动。
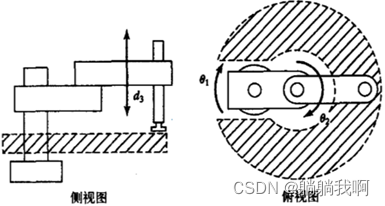
5.拟人型机械臂
拟人型机械手的几何构形由三个转动关节实现。其第一个关节的旋转轴与另外两个关节的旋转轴垂直,而另外两个关节的旋转轴是平行的,如下图所示。由于其结构和功能与人类的胳膊相似,相对应地称第二个关节为肩关节,第三个关节由于联结了胳膊和前臂,所以称为肘关节。拟人型机械手的结构是最灵活的一种,因为其所有关节都是转动型的。另一方面,拟人型机械手的自由度与笛卡儿空间变量之间失去了对应性,所以腕的定位精度在工作空间内是变化的。拟人型机械手的工作空间近似于球形空间的一部分,相较于其负担而言,工作空间的容积较大。其关节通常由电机驱动。拟人型机械手具有很广阔的工业应用范围。

三、并联机械臂
边栏推荐
- 正规方程、、、
- 2022年能源与环境工程国际研讨会(CoEEE 2022)
- Practice sharing of packet capturing tool Charles
- Common methods of thread scheduling
- 【Energy Reports期刊发表】2022年能源与环境工程国际会议(CFEEE 2022)
- 机器学习——感知机及K近邻
- Flink checkPoint和SavePoint
- 图解杂项【防止丢失进行存档用的】
- SQL sever基本数据类型详解
- How can I solve the problem that the swiper animation animation fails when switching between left and right rotations of the swiper?
猜你喜欢









随机推荐
leetCode-929: 独特的电子邮件地址
被困英西中学的师生安全和食物有保障
uniapp实现点击拨打电话功能
牛客-TOP101-BM29
leetCode-1823: 找出游戏的获胜者
2022年能源与环境工程国际研讨会(CoEEE 2022)
Leetcode-1823: find the winner of the game
抓包工具charles实践分享
Leetcode interview question 16.06: minimum difference
正规方程、、、
2. login and exit function development
Troubleshooting steps for Oracle pool connection request timeout
leetCode-面试题 16.06: 最小差
【IEEE出版】2022年智能交通与未来出行国际会议(CSTFM 2022)
International Symposium on energy and environmental engineering in 2022 (coeee 2022)
Flink集群搭建以及企业级yarn集群搭建
线程运行原理
栈题目:函数的独占时间
线程的六种状态
SVG+js拖拽滑块圆形进度条