当前位置:网站首页>Petit guide de construction rapide du bras mécanique (II): application du bras mécanique
Petit guide de construction rapide du bras mécanique (II): application du bras mécanique
2022-06-24 10:30:00 【Allonge - toi sur moi.】
Table des matières:
Guide de construction rapide du bras mécanique(Un.):Développement du manipulateur
Guide de construction rapide du bras mécanique(2.):Application du bras mécanique
Avec le développement de la société,Il y a tellement de choses qu'un bras robotique peut faire.,La lune peut être couverte de neuf jours(Qui n'a pas de longues mains sur un Rover??),Vous pouvez attraper des tortues dans cinq océans(Chez qui?UUVPas tout le bras robotique.?).Faire des choses、Réparer les choses、Traitement des maladies、Déplacer des choses、Soudage,Tout ce que vous ne voulez pas faire peut être fait pour vous., Ce que vous ne pouvez pas faire, il peut le faire pour vous. .
En bas, Prenons l'exemple de certains leaders nationaux et étrangers de l'industrie des bras mécaniques et des bras mécaniques les plus importants dans divers domaines. , Introduction de l'application du bras mécanique .
1.Dans l'usine
C'est plus parfumé avec un bras robotique qu'avec un homme. , L'Extase capitaliste , La figure ci - dessous montre ABBRobot industriel.

Des entreprises comme la fabrication de puces qui exigent un environnement de traitement élevé , Les bras robotisés peuvent bien sûr aussi être enveloppés , L'image ci - dessous montre le travail dans la salle blanche KUKABras robotisé.

2. Dans le parc d'attractions
C'est vrai.,Je ne pensais pas non plus, Qui va travailler dans un parc d'attractions? ?La figure ci - dessous montreKUKA .Bras robotisés de divertissement fabriqués , Disponible à la vente ou à la location .

3. Sur le champ de bataille terrestre
Quand l'ennemi a posé des mines , Vous pouvez utiliser un bras robotique amovible pour le déminage . La figure ci - dessous montre le bras mécanique d'élimination des explosions développé par l'Institut d'automatisation de Shenyang de l'Académie chinoise des sciences. Scorpio.

4.Fonds marins
Aquanaut C'est un robot sous - Marin déformable , Bras robotisé avec deux 8 DOF .Il aAUV Croisière et ROV Deux modes de fonctionnement , .Matériel auto - conçu avec AI La composition logicielle du pilote , Il s'agit d'une opération entièrement autonome sur le fond marin ou d'une télécommande par satellite. .

5.En l'air
PD6B-AW-ARMLes drones Avec une paire de bras articulés qui se déplacent librement , Pour en faire une machine polyvalente , Son champ d'application est illimité . Sa société de production PRODRONE Nommez ces drones “ Drone de travail direct ”, Sa charge maximale peut atteindre 20Kg.

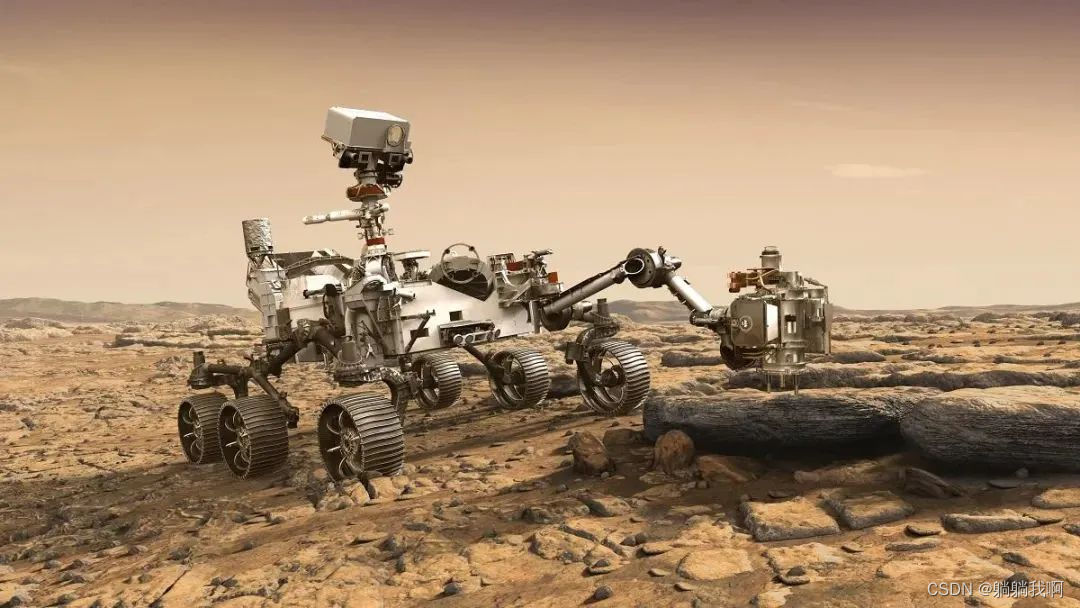
6. Sur Mars
Les bras robotisés installés sur le Rover endurance peuvent effectuer des échantillonnages de roches, etc. , Et le BIT peut être remplacé par lui - même . Quand les scientifiques ont trouvé un échantillon particulièrement attrayant , Ils peuvent tendre les bras du Rover , Utiliser un broyeur pour lisser la surface de la roche , Révéler sa structure interne et sa composition . Une fois qu'ils auront terminé ce travail , L'équipe utilisera le nom PIXL(X Instruments planétaires pour la pétrochimie des rayons X )EtSHERLOC( Analyse des matières organiques et des produits chimiques dans un environnement habitable à l'aide de techniques Raman et luminescentes ) Pour recueillir des informations chimiques et minéralogiques plus détaillées .
7. Dans l'espace
La station spatiale chinoise et la station spatiale internationale sont équipées de plusieurs bras mécaniques , .Pour capturer le vaisseau 、 Faire tourner l'orientation de la cabine et aider les astronautes à travailler à l'extérieur de la cabine . La figure ci - dessous montre le bras canadien installé sur la station spatiale internationale. 2No., Il capture “Dragon”Vaisseau spatial.

8.Dans la salle d'opération
Le célèbre système de robot chirurgical Leonardo da Vinci est commandé par une console de chirurgien 、 Système de bras robotisé côté lit et composition du système d'imagerie , Le premier produit a été 1998Année11 Livraison mensuelle à des clients allemands pour utilisation , Aujourd'hui, le système de robot chirurgical Leonardo da Vinci de quatrième génération , En utilisant une méthode minimalement invasive , Effectuer des interventions chirurgicales complexes .

9. Sur les jouets
1984Année,TOMYOffre de l'entrepriseOmnibot 2000 Robot jouet , Il a un bras mécanique à entraînement électrique , Peut accomplir des tâches telles que le plateau d'extrémité sous le contrôle de la télécommande , Son programme de contrôle est stocké dans une cartouche .

边栏推荐
- 使用swiper左右轮播切换时,Swiper Animate的动画失效,怎么解决?
- 1.项目环境搭建
- 进程与多线程
- 2022年能源与环境工程国际研讨会(CoEEE 2022)
- What are the characteristics of EDI local deployment and cloud hosting solutions?
- How can I solve the problem that the swiper animation animation fails when switching between left and right rotations of the swiper?
- 【数据分析数据源】全国各省市行政区坐标(包含边界坐标点和中心坐标点)
- 微信小程序rich-text图片宽高自适应的方法介绍(rich-text富文本)
- Learning to organize using kindeditor rich text editor in PHP
- Web site development, lazy image loading
猜你喜欢








随机推荐
【数据分析数据源】全国各省市行政区坐标(包含边界坐标点和中心坐标点)
2022 the most complete and detailed JMeter interface test tutorial and detailed interface test process in the whole network - JMeter test plan component (thread < user >)
百度网盘下载一直请求中问题解决
卷妹带你学jdbc---2天冲刺Day1
3.员工的增删改查
numpy.linspace()
H5网页如何在微信中自定义分享链接
leetCode-2221: 数组的三角和
Younger sister Juan takes you to learn JDBC --- 2-day sprint Day1
Flink cluster construction and enterprise level yarn cluster construction
进程与多线程
希尔排序图文详解+代码实现
SF Technology Smart logistics Campus Technology Challenge (June 19, 2022) [AK]
[IEEE publication] 2022 International Conference on service robots (iwosr 2022)
leetCode-223: 矩形面积
【JS逆向分享】某个网站社区信息
包装类型的缓存机制
微信小程序rich-text图片宽高自适应的方法介绍(rich-text富文本)
SQL sever基本数据类型详解
charles抓包工具使用教程