当前位置:网站首页>【AUTOSAR CanDrive 1.学习CanDrive的功能和结构】
【AUTOSAR CanDrive 1.学习CanDrive的功能和结构】
2022-07-23 05:43:00 【余生】
我们知道CanDrive是通信协议栈中的最底层,之前的文章已经讲了在autosar架构中的Com服务层系列文章Com通信系列介绍
我们废话不多说,直接进入今天的主题
目录
1.CAN Drive的概念了解
为了与文档描述保持一致,下文将使用CAN模块来表示CAN Driver。简单地说,CAN模块属于一部分的最底层内容,其作用是执行硬件访问和为上层提供独立的硬件接口(这里能访问CAN模块的上层只有Can Interface模块)。说到访问硬件,先了解几个概念,如下图所示:
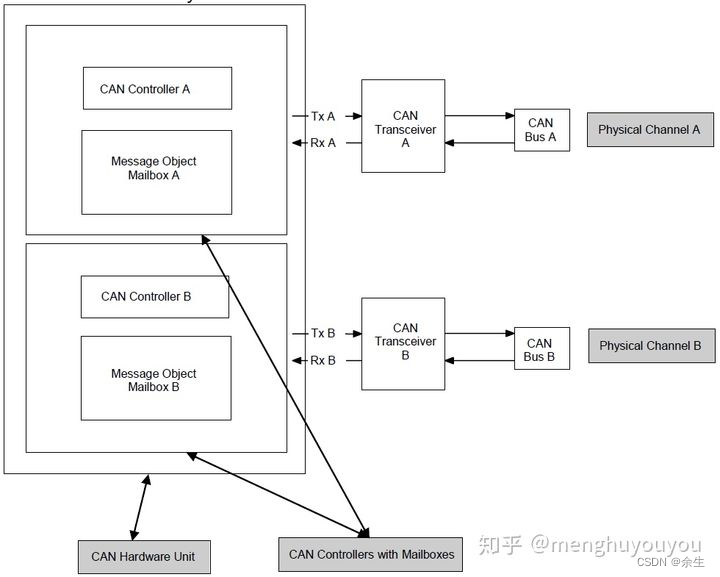
对图内容的解释如下:
- 一个**CAN 硬件单元(CAN HardwareUnit)**就相当于某个ECU的CAN硬件部分,它可以包括一个或多个CAN控制器(Controller)。
- 一个CAN控制器就是一个CAN节点或一条CAN,即对应连接一条物理通道。它有很多个报文邮箱(message object)。
- 一个报文邮箱又有多个寄存器,用来存储报文信息,如下图5所示。

所以关于CAN接收和发送,由上可知CAN模块访问的是CAN硬件单元的某个CAN控制器的某些寄存器。那么CAN模块在怎样的条件才能访问到呢?下面需要再介绍几个概念:
首先给出我们结论:如果我们想接受或者发生我们的消息,要保证两个状态机的状态 1.我们的Can Drive驱动状态机2.对应Can Controller 控制器的状态机。
首先我们说一下Can Drive驱动状态机
1.1 Can Drive驱动状态机(Driver state machine)
CAN模块驱动状态机有两个状态,在上电或重置后,CAN模块进入CAN_UNINIT状态(未初始化状态),初始化后,CAN模块进入CAN_READY状态,这时可执行一些与读、写、总线关闭、唤醒和控制器状态设置相关的功能。也就是说CAN接收和发送必须在驱动状态机处于CAN_READY才能执行。

1.2 Can Controller状态机(Controller state machine)
在驱动状态机处于CAN_READY状态前提下,还需要考虑CAN控制器状态。因为在硬件层面,CAN控制器会执行很复杂的状态机,去实现不同的硬件行为。有时是需要在相应的状态才会去实现某些功能,比如初始化,波特率设置等;有时是外部事件(总线关闭,唤醒事件)会触发状态变化,导致是否能执行某些功能。
出于简化目的,这里将CAN控制器的状态分为4个。

CAN控制器未初始化- UNINIT 属于CAN模块的所有寄存器都处于复位状态,不使能CAN中断。 CAN控制器不参与CAN总线。
CAN控制器状态已停止- STOPPED 在这种状态下,CAN控制器已初始化,但不参与总线。另外也不得发送错误帧和确认。
CAN控制器状态已启动- STARTED 控制器处于正常运行模式,具有完整的功能,这意味着它已加入网络。
对于许多控制器而言,离开“初始化”模式会使控制器启动。CAN控制器状态为睡眠- SLEEP 与STOPPED仅有的不同是:CAN的硬件设置支持睡眠模式(由CAN硬件支持唤醒的CAN总线直接唤醒)
通过上述定义可知:CAN接收和发送必须在控制器状态机处于STARTED状态才能执行。怎么能让CAN控制器处于STARTED状态呢,通过上述状态机不难发现,得先进入STOPPED状态才行。一般有以下几种方法来触发CAN控制器的状态转移到STOPPED:
- 初始化函数 Can_Init,使控制器状态从UNINIT转移到STOPPED;
- 位速率设置函数Can_SetBaudrare,使控制器状态转移到STOPPED;
- 控制器模式设置函数Can_SetControllerMode, 使控制器状态转移到目标状态;
- 硬件事件触发,比如唤醒事件使控制器从SLEEP转移到STOPPED,总线关闭事件使控制器从STARTED转移到STOPPED。
文档对这4个状态和控制器模式设置函数Can_SetControllerMode都做明确的定义
1.3 Can模块初始化的内容
上述两个状态一般都是先通过初始化函数设置,即在使用Can模块的任何其他功能之前,ECU状态管理器模块在启动阶段调用CAN模块的初始化函数(Can_Init)进行初始化,其内容有:
- 静态变量,包括标志;
- 完整的CAN硬件单元的通用设置;
- 每个CAN控制器的CAN控制器特定设置。

初始化后,CAN驱动状态为CAN_READY,CAN控制器状态为STOPPED。
当CAN模块满足条件,可以访问寄存器了,那么CAN模块怎么去实现CAN发送或接收所需的操作呢?以及需要做哪些操作呢??
1.4 协议数据单元(Protocol Data Unit, PDU)
在回答这两个问题前,为了发送或接收涉及的数据格式,需再介绍下PDU的概念,PDU包括协议控制信息(Protocol Control Information,PCI)和服务数据单元(Service Data Unit, SDU)。
其中SDU是指从上层模块传过来,要求发送的数据;或下层模块接收的,已提取好的数据,需要传给上层。
PCI是指需要将SDU从特定协议层的一个实例传递到另一实例。 例如。 它包含源和目标信息。PCI在发送方的协议层添加,再在接收方被删除。
通俗地理解就是:PDU不仅仅是数据(SDU),还携带了来自哪要去哪的信息(PCI);每到哪都会删掉之前的信息,添加这是哪要去哪的信息(不同层的PCI更新),如下图所示。

1.5 发送操作
对于CanDrive来说,发送信号的要做两件事:一是先访问硬件,将数据写入寄存器;二是发送成功后,向上层CAN Interface模块确认。

但是对整个autosar的架构我们要清楚其发送的整个流程:

针对写数据操作,CAN Interface模块调用Can_Write函数,其定义如下:

这里首先要说明下Hth的定义。每一个硬件对象都由ID,DLC和 SDU三部分组成,如下图15。用来存储写入数据的硬件对象就叫Hth,用来存储接收数据的硬件对象就叫Hrh


所以不难理解,Can_Write的输入参数Hth其实就是硬件对象的编号(id),而且实际上是已经定义好了硬件对象的编号与CAN ID的映射关系,比如下图16所示,如果想发送CAN ID 为0x001的数据,那么调用Can_Write函数的输入参数Hth应该为4。

然后引用文档内容说明下Can_Write函数要执行主要动作,如下所示:
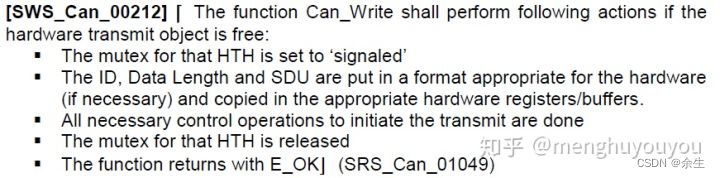




这样我们就知道写数据的过程,最后再了解下发送确认过程,从前面文章可知,BSW调度器会周期性调用Can_MainFunction_Write函数,其定义如下:

注意这个函数调用的条件是CAN发送处理方式为POLLING(轮询)。这里说明下CAN发送处理方式,有3种:
(1)轮询模式(polling mode)
轮询模式下Can模块的发送确认被调度模块(BSW Scheduler)触发,执行随后的处理。比如设定CAN发送为轮询模式,那么Can_MainFunction_Write就会在预定义的时间间隔被周期性地调用(比如每几ms调用一次),然后Can_MainFunction_Write中再去调用上层的CAN Interface模块的CanIf_TxConfirmation模块,向上确认。
(2)中断模式(interrupt mode)
中断模式下Can模块的发送确认由CAN控制器的中断触发,执行随后的处理,比如设定CAN发送为中断模式,那么中断触发后,调用Can模块的发送确认处理函数,在该函数中去调用Can Interface模块的CanIf_TxConfirmation函数,向上确认。
(3)混合模式(mixed mode)
即(1)(2)的混合使用,看具体设定,是使用轮询模式还是使用中断模式的处理方式。
所以这里我选择的是轮询方式进行介绍。根据CanIf_TxConfirmation函数的输入参数可知,向上确认的是哪个CAN ID发送成功。(这里不对CanIf的函数介绍,下篇文章再介绍)
接收操作
从前面文章可知,CAN接收时,对于CAN模块同样有两个操作:一是先访问硬件,从寄存器提取数据;二是通知上层CAN Interface模块,传递数据。
针对读数据操作,首先BSW调度器周期性调用Can模块的Can_MainFunction_Read函数,其定义如下。同样地CAN接收处理方式有轮询,中断和混合模式 。这里选择的是轮询模式。
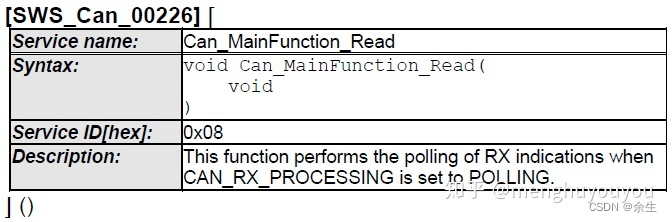
最后,数据成功提取后,Can_MainFunction_Read函数将通过调用CanIf_RxIndication函数通知CAN Interface模块,向上传递数据。(这里不对CanIf的函数介绍,下篇文章再介绍)
总结
我们用思维导图的形式去总结我们今天发送与接收操作的整个过程

预告:下一篇我们讲学习下Canif层的知识
边栏推荐
- 硬件知識1--原理圖和接口類型(基於百問網硬件操作大全視頻教程)
- ARM架构与编程7--异常与中断(基于百问网ARM架构与编程教程视频)
- 单片机学习笔记9--串口通信(基于百问网STM32F103系列教程)
- 时间序列的数据分析(一):主要成分
- 时间序列的数据分析(二):数据趋势的计算
- 2021可信隐私计算高峰论坛暨数据安全产业峰会上百家争鸣
- “東數西算”下數據中心的液冷GPU服務器如何發展?
- 利用or-tools来求解带容量限制的路径规划问题(CVRP)
- #under指令
- NLP natural language processing - Introduction to machine learning and natural language processing (I)
猜你喜欢
时间序列的数据分析(三):经典时间序列分解

2021 TOP10 development trend of information science. Deep learning? Convolutional neural network?

高分子物理名词解释归纳

google or-tools的复杂排班程序深度解读

论文解读:《功能基因组学transformer模型的可解释性》

Interpretation of the paper: DNA enhancer sequence recognition transformer structure based on Bert and two-dimensional convolutional neural network

Deep learning neural network
2021可信隐私计算高峰论坛暨数据安全产业峰会上百家争鸣

The green data center "counting from the east to the west" was fully launched

NLP natural language processing - Introduction to machine learning and natural language processing (I)
随机推荐
A hundred schools of thought contend at the 2021 trusted privacy computing Summit Forum and data security industry summit
The online seminar on how to help data scientists improve data insight was held on June 8
UE4 solves the problem that the WebBrowser cannot play H.264
永磁电机参数的测量获取(电感、电阻、极对数、磁链常数)
NLP自然语言处理-机器学习和自然语言处理介绍(一)
论文解读:《基于注意力的多标签神经网络用于12种广泛存在的RNA修饰的综合预测和解释》
Comment se développe le serveur GPU refroidi à l'eau dans le Centre de données dans le cadre de l'informatique est - Ouest?
Installation and use of APP automated testing tool appium
How to establish data analysis thinking
深度学习-神经网络
读写文件数据
NLP自然语言处理-机器学习和自然语言处理介绍(二)
Notes | Baidu flying plasma AI talent Creation Camp: detailed explanation of deep learning model training and key parameter tuning
绿色数据中心“东数西算”全面启动
Notes | Baidu flying plasma AI talent Creation Camp: data acquisition and processing (mainly CV tasks)
论文解读:《基于预先训练的DNA载体和注意机制识别增强子-启动子与神经网络的相互作用》
Notes | Baidu flying plasma AI talent Creation Camp: How did amazing ideas come into being?
论文解读:《功能基因组学transformer模型的可解释性》
Six trends and eight technologies of high-performance computing in data centers under "data center white paper 2022" and "computing from the east to the west"
智能指针shared_ptr和unique_ptr