当前位置:网站首页>3D point cloud course (VII) -- feature point description
3D point cloud course (VII) -- feature point description
2022-07-23 19:42:00 【The birch tree has no tears】
1. What is characteristic point
1.1 Image feature points

ORB slam

1.2 Point cloud feature points

Point cloud registration :ICP It is required to have a good enough initial translation and rotation matrix , And there is a certain coincidence rate

2. How to extract feature points
2.1 Image extraction feature points
2.1.1 Harris

 A good feature , The interior will change as it moves
A good feature , The interior will change as it moves

U,V The smaller, the more sensitive The characteristic point is x、y There is a large reciprocal in all directions






NMS Operate to filter feature points

The core idea : After a small square moves , Inside Intensity Transform to select feature points . It turns into finding the covariance matrix in the block M, First order inversion in each direction .

2.2 Point cloud feature points
2.2.1 3DHarris



 2.2.2 PCA
2.2.2 PCA
Points with many points in three directions are characteristic points


 Traditional methods are very sensitive to noise , Can't use
Traditional methods are very sensitive to noise , Can't use
2.3 Deep learning feature extraction
2.3.1 USIP
 Unsupervised learning : 1、 Feature points have nothing to do with point cloud rotation 2、 Feature points are related to scale It limits the perception domain
Unsupervised learning : 1、 Feature points have nothing to do with point cloud rotation 2、 Feature points are related to scale It limits the perception domain

The previous column has high confidence , The next column is all feature points

3. Description of feature points
3.1 Based on histogram
3.1.1 Histogram based

Only care about the distance between points , Don't care about point distribution
3.1.2 Signature based

Rotate the same thing , The description will change
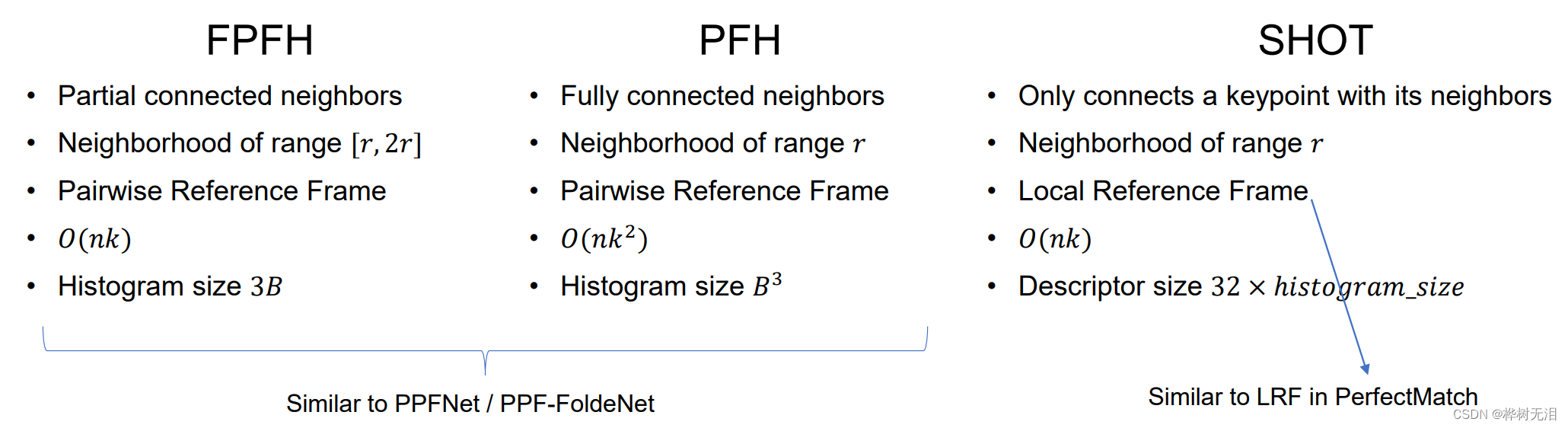
3.1.3 PFH
The line between each point and the surrounding points

1、 Set up a coordinate system

2、 Calculating characteristics
Describe the change of points around feature points

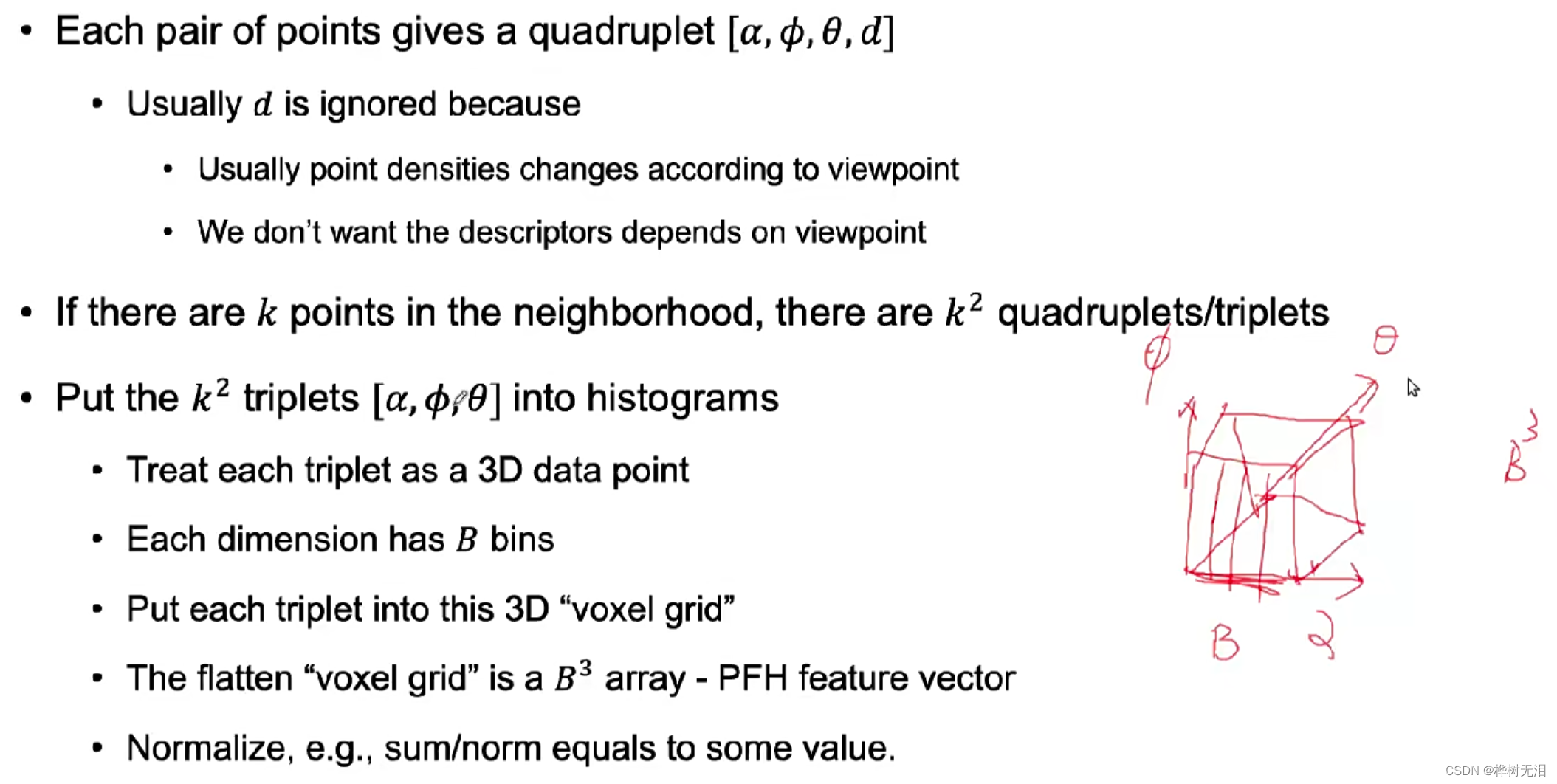
3、 Each characteristic parameter establishes a histogram

3.1.4 SPFH
Only the line between the feature points and the surrounding points is considered , Make three histograms

3.2 Based on coordinate system
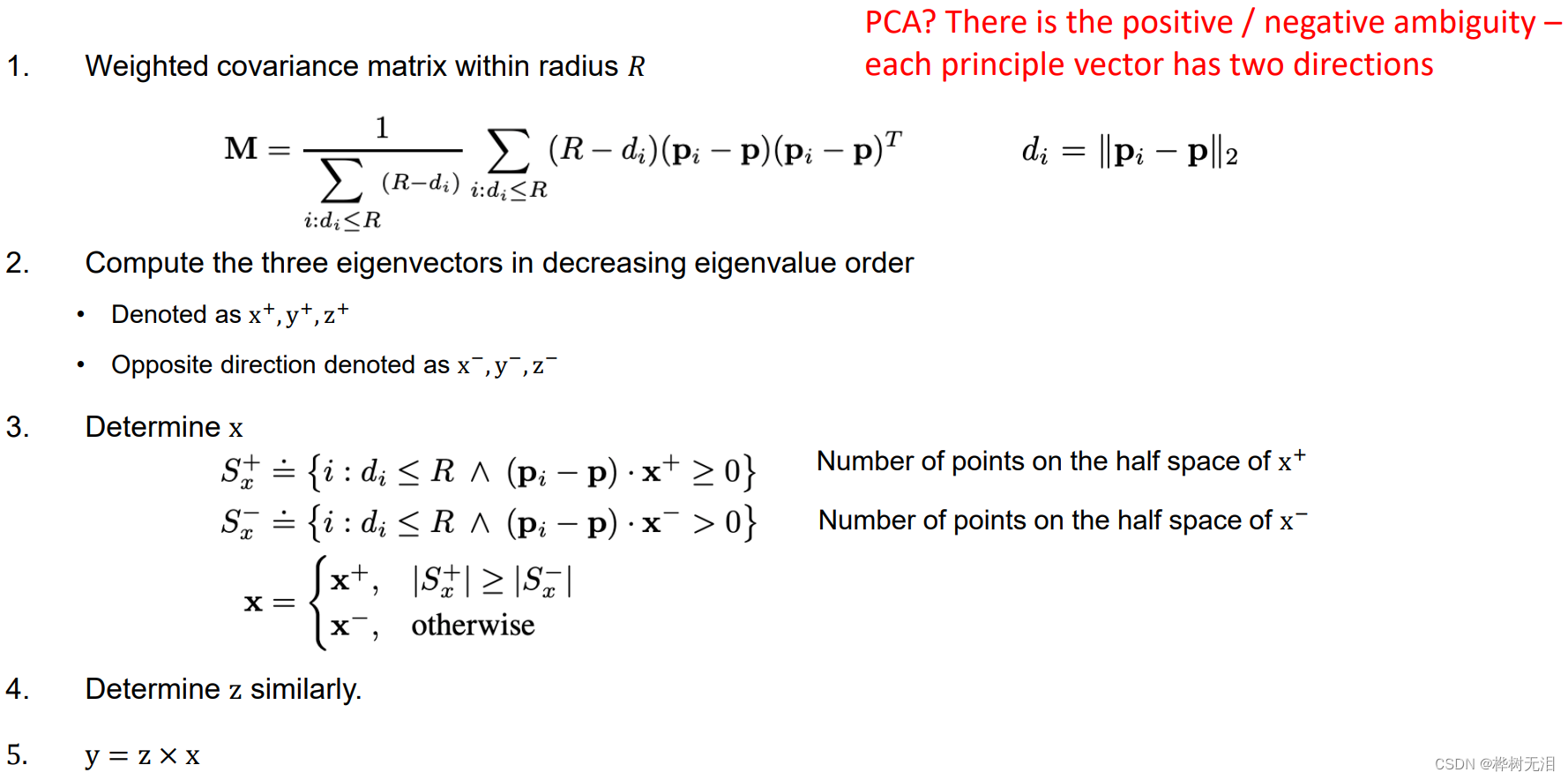
3.2.1 SHOT
- Set up a coordinate system LRF
2. Divide the space around the feature points into 32 block
3. Calculate the histogram of each small space , The length of each histogram is 11

There is a hard cutting problem , Unstable to noise , So soft cutting is proposed . Voting without direct bonus is either black or white , But the probability of becoming linear interpolation .
- summary
4. Feature point matching
边栏推荐
猜你喜欢
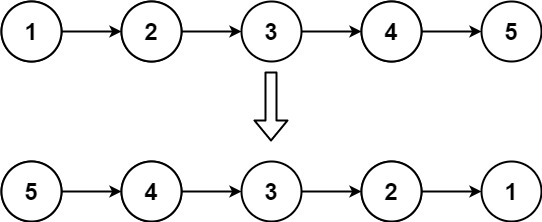
【leetcode天梯】链表 · 206 反转链表

As a background developer, you must know two kinds of filters

记一次被网络诈骗的经历

ACM mm 2022 oral | dig: the new framework of self-monitoring character recognition refreshes the recognition performance of 11 public scene character data sets, with an average improvement of 5%

According to the e-commerce written on the resume, how does redis realize inventory deduction and prevent oversold?

canvas绘制文本和清除绘制

MySQL 啥时候用表锁,啥时候用行锁?
![Codeforces round 809 (Div. 2) [VP record]](/img/1d/17a28f3c77aa419e63a955a8445e7a.png)
Codeforces round 809 (Div. 2) [VP record]

入门数据库days1

LeetCode刷题:回文数
随机推荐
(干货)结合Scikit-learn介绍几种常用的特征选择方法
【leetcode天梯】链表 · 206 反转链表
Using FRP to achieve intranet penetration
Talk about the parental delegation mechanism in detail (often asked in interviews) [easy to understand]
在Hyper-V中手动将.avhd合并到.vhd
Little fish sends lidar | just dinner is the first lottery
Data link layer -------- Ethernet and ARP
Still using xshell? You are out. I recommend a more modern terminal connection tool
二、MFC窗口和消息
BoundsChecker用法「建议收藏」
Industry analysis | logistics intercom
H7-TOOL的CANFD/CAN接口脱机烧写操作说明, 已经更新(2022-07-12)
Codeworks round 805-808 [partial solution]
H7-TOOL的I2C接口方式脱机烧录操作方法,已经发布(2022-07-16)
树莓派ssh登录
Why are there Chinese materials and web pages for foreign chips?
移动语义和完美转发浅析
[英雄星球七月集训LeetCode解题日报] 第23日 字典树
项目实战第九讲--运营导入导出工具
【面试:并发篇22多线程:ReentrantLock】