当前位置:网站首页>Kitten paw: FOC control 15-mras method of PMSM
Kitten paw: FOC control 15-mras method of PMSM
2022-06-24 00:19:00 【Kitten paw】
Kitten claw :PMSM And FOC control 15-MRAS Law
1 Preface
This article briefly introduces the model adaptive method (Model Reference Adaptive System - MRAS) Application in sensorless control of permanent magnet synchronous motor . To be honest, this method is compared with the previous two state observers , That is low More than a little , So its content is also very simple , Let's start with the ugly words , Because this method is rarely used in actual motor control applications , Here we will only introduce the principle and simulation structure , Interested partners can migrate it to the physical hardware and verify it by themselves , But I guess the effect is not very good .
2 MRAS brief introduction
First intercept those papers MRAS The principle is described as : The main idea of model reference adaptive method is to take the equation without unknown parameters as the reference model , The equation containing the parameters to be estimated is regarded as an adjustable model , The outputs of the two models have the same physical meaning , Both models work at the same time , The output error is used to form an appropriate adaptive law to adjust the adjustable model parameters , In order to control the object output tracking reference model , As follows :

If you look carefully, MRAS Model principle of , Do you feel a little familiar , Post the schematic diagram of the previous state observer :
You can find MRAS In fact, it is a simplified version of state observation , It also makes up a mathematical model to simulate the working condition of the real motor , stay MRAS This mathematical model is called the adjustable model , The reference model is the actual motor body , Then the adjustable model is slowly modified by error , The correction process here is called adaptive adjustment , This is it. MRAS How does it work .
Here is a free discussion session : Here we might as well discuss MRAS What are the limitations of ? First of all, the above mentioned MRAS Is a simplified version of the state observer , The simpler the structure is , Then the model itself requires higher precision of model constant parameters and model input , Otherwise, there is no guarantee MRAS The accuracy of the model , This actually means MRAS The anti-interference performance of is not very good , After all, both observation errors and systematic errors will bring uncertainty to this simple model ; In addition, the variable parameters of the adjustable model need to be adjusted by error , Therefore, the adaptive mechanism responsible for adaptive adjustment is extremely important , There must be a reasonable and stable adaptive mechanism to ensure the robustness and timeliness of the adaptive process , No matter what the controller is, it can't take into account all the situations , So this is also extremely difficult . Sum up 2 spot ,MRAS It is extremely difficult to make great achievements in practical motor applications . The above is my personal understanding , Mistakenly spray .
3 Adjustable model and adaptive mechanism
Here I will not deduce the formula one by one , I recommend you to read a paper 《 Design of speed sensorless control system for permanent magnet synchronous motor based on model reference adaptive , Northeast University - Chang Kai 》, Please download and watch by yourself . The results are posted directly here :
among :
It can be seen that at last, it is simplified according to the relevant mathematical ideas , Finally, the estimated angular speed of the motor is actually an error PI Adjust the resulting output , This is actually the PLL adjustment I mentioned earlier , So the adaptive mechanism in the adaptive adjustment model is actually a phase locked loop in essence .
4 Simulation setup
Build according to the above content MRAS The simulation of is also extremely simple ,MARS as follows :
The adjustable model part is as follows :
The adaptive mechanism is as follows :
Run the simulation , Observe the rotor position output by the adaptive model and the actual rotor position output by the motor model as follows :
END
边栏推荐
- 元宇宙中的社会秩序
- Shutter time selector
- 物联网卡设备接入EasyCVR,如何查看拉流IP以及拉流时间?
- Summary of common register bit operation modes in MCU
- Go language core 36 lectures (go language practice and application 11) -- learning notes
- What is the future development of palmprint recognition technology?
- 社招面试必不可少——《1000 道互联网大厂 Android工程师面试题》
- 想开户炒股,通过网上进行股票开户安全吗?-
- First week of summer vacation
- Nice input edit box
猜你喜欢

Keywords such as extern and struct

合成大西瓜小游戏微信小程序源码/微信游戏小程序源码

The easycvr program started abnormally as a service, but the process started normally. What is the reason?

paddle使用指南

如何入门机器学习?

Return, const, volatile keywords
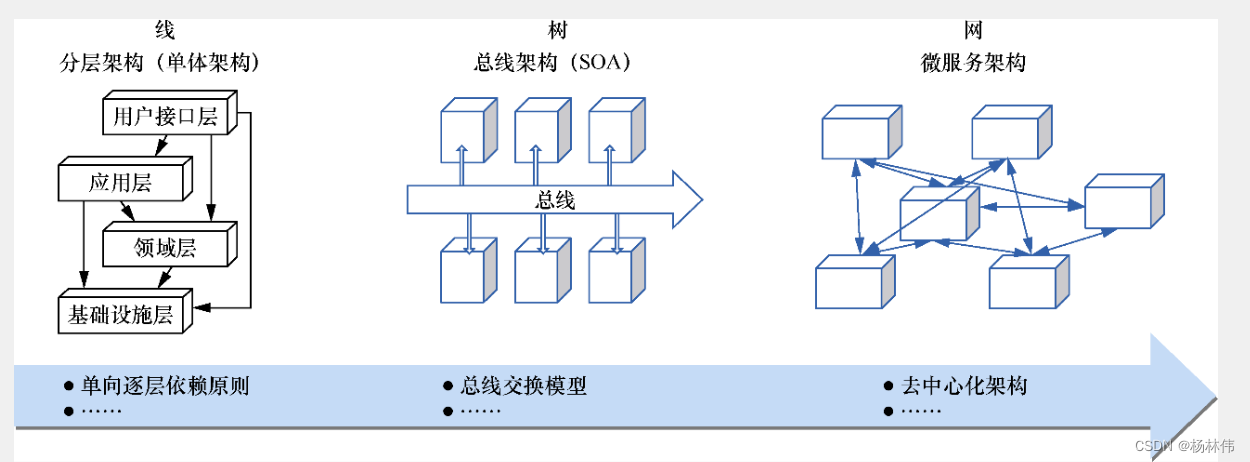
Cloud native architecture (05) - Application Architecture Evolution

【面试经验包】面试被吊打经验总结(一)

毕业设计-论文写作笔记【毕设题目类型、论文写作细节、毕设资料】

I was cheated by my colleagues to work overtime on weekends. I haven't seen redis used like this...
随机推荐
. Net
Shutter time selector
Go language core 36 lectures (go language practice and application 11) -- learning notes
When the IOT network card device is connected to easycvr, how can I view the streaming IP and streaming time?
Hackers can gain administrator privileges by invading Microsoft mail server and windows Zero Day vulnerability November 23 global network security hotspot
C语言:关于矩阵右移问题
EasyCVR程序以服务启动异常,进程启动却正常,是什么原因?
Android App bundle exploration, client development interview questions
Android 3年外包工面试笔记,有机会还是要去大厂学习提升,作为一个Android程序员
Shuttle global levitation button
js 语言 精度问题
[traffic light identification] traffic light identification based on Matlab GUI [including Matlab source code 1908]
Andorid 开发艺术探索笔记(2),跨平台小程序开发框架
[leetcode notes] no118 Yanghui triangle
C language: on the right shift of matrix
测试 - 用例篇 - 细节狂魔
First week of summer vacation
Shutter control layout
Chaos engineering, learn about it
2022考研经验分享【初试、择校、复试、调剂、校招与社招】