当前位置:网站首页>论文阅读:The Perfect Match: 3D Point Cloud Matching with Smoothed Densities
论文阅读:The Perfect Match: 3D Point Cloud Matching with Smoothed Densities
2022-07-22 22:20:00 【CPFWWS】
摘要
本文提出3DSmoothNet,使用十分相似的深度学习架构和全卷积层,使用体素平滑密度值(SDV)表示。后者被计算于感兴趣的点和排列成局部参考帧(LRF)以实现旋转不变性。
94.9%的召回率在3DMatch基准数据集上。输出仅32维度,这么低的维度输出允许在标准PC上以0.1ms每个点的速度搜索。因为SVD和LRF和用全卷积学习的高质量的描述特征,我们的方法是传感器和场景不固定的。
介绍
两类配准:基于描述子和基于几何特征。描述子:手工设置用直方图描述邻居,或局部表面标准。
很多3D特征学习网络既不是旋转不变的,而且需要非常大的输出维度才能成功,或者很难泛化到新的领域。
本文的特点:有低的输出维度(16或32),高描述子,泛化能力强,旋转不变性。
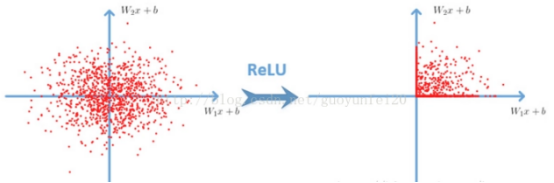
SDV降低了输入体素网格的稀疏性,能在向后传播中获得更好的梯度,同时降低边界的影响as well as smoothing out small miss-alignments due to errors in the estimation of the local reference frame (LRF)
本质不变特征:point pair features
pointnet和pointnet++是一种框架的先驱,他们展示了一个变换不变性的网络,但是他们在提取几何信息上并不令人满意,因为他们无法使用卷基层在网络中。
PPF用Pointnet但是非旋转不变性,PPF-foldnet解决了旋转不变性。
本文将两个点云建立关系如下:

如果Q和P匹配成功,那么K就为1,公式中有三个未知量,采用映射到高维的办法可以解出K,从而解出变换矩阵。
边栏推荐
- C language minesweeping
- php数组下标是不是只能从0开始
- 数据库基础及安装
- 张宇高数30讲总结
- Worthington对肝细胞分离系统的测试及相关优化方案
- 技术干货 | 数据处理好难?来看MindSpore提供的解决思路!
- ZABBIX agent creates monitoring items
- 使用路由协议配置 IPv6 over IP手动隧道
- The Chinese and English dot matrix character display principle of the 111th blog of the fledgling Xiao Li
- Fault tolerant processing with hystrix
猜你喜欢

@Transactional transaction methods contain multiple transaction methods of the same kind. These transaction methods themselves are set to fail. There are two solutions

Learn these SketchUp skills and improve work efficiency by half

Experiment 2 YUV

21 -- product of arrays other than itself

pip更新一个package

Topic domain model

Qt+vtk+pcl pictures are converted to grayscale images and displayed with grayscale as the Y axis

轻松带你走进turtle绘图的大门

matlab simulink 水能和同步电机发电
昇思易点通 | 经典卷积神经网络的深度学习解析
随机推荐
matlab simulink 磷酸铁锂电池仿真
大咖訪談 | 開源社區裏各種奇怪的現狀——夜天之書陳梓立tison
Can PHP array subscripts only start from 0
数据脱敏的场景与价值【总结】
Organizational structure of agile testing team
Wechat applet project practice
RestClient操作索引库-初始化RestClient
使用路由协议配置 IPv6 over IP手动隧道
Dispersion tensor analysis open source software DSI studio simplified Chinese version can be downloaded
Solution to the second game of 2022 Hangzhou Electric Multi school league
Experiment 7 H.264 file analysis
Topic domain model
wps数据拆分
实验七 H.264文件分析
数据库基础及安装
方正中期是什么级别的期货公司?开户安全可靠吗?
How to use selenium.chrome to realize the extended function of intercepting or forwarding requests
pip更新一个package
直播预告 | 开源安全治理模型和工具直播研讨会
C language minesweeping