当前位置:网站首页>Quick completion guide for manipulator (III): mechanical structure of manipulator
Quick completion guide for manipulator (III): mechanical structure of manipulator
2022-06-24 10:32:00 【Lie on me】
Directory :
Quick completion guide of mechanical arm ( zero ): Main contents and analysis methods of the guide
Quick completion guide of mechanical arm ( One ): The development of manipulator
Quick completion guide of mechanical arm ( Two ): Application of mechanical arm

Matter is the basis , therefore , To figure out how the manipulator controls , You first need to know what's on the robot arm , What is the relationship between them , That is, the mechanical arm Mechanical structure and Core components .
This chapter mainly introduces the mechanical structure of the manipulator .
One 、 summary
The mechanical mechanism of the manipulator consists of a series of rigid members ( connecting rod ) Through the link ( The joints ) Connect , The manipulator is characterized in that it has the function of ensuring mobility arm ( arm ), Providing flexibility Wrist ( wrist ) And execute what the robot needs to accomplish
Mission End actuators ( end - effector ).
The manipulator is divided into series manipulator and parallel manipulator . In the guide , Our main research is Serial manipulator .
 |  |
| Serial manipulator | Parallel manipulator |
The movement ability of the manipulator is guaranteed by the joints . Two adjacent links can be connected by moving the joint ( prismatic joint) Or rotate the joint ( revolute joint) Realization . In an open kinematic chain , Each moving or rotating joint provides a degree of freedom for the mechanical structure ( degrees of freedom , DOF ). Moving the joint can realize the relative translation between the two connecting rods , The rotary joint can realize the relative rotation between the two connecting rods ( Rotating joints are simpler and more reliable than moving joints ). And in a closed kinematic chain , Constraints due to closed loop , The degree of freedom should be less than the number of joints .
The degree of freedom must be reasonably arranged along the mechanical structure on the manipulator , To ensure that the system can have enough freedom to complete the specified task . Usually in a task of arbitrary positioning and orientation in three-dimensional space 6 A degree of freedom , among 3 Degrees of freedom are used to locate the target point , in addition 3 Degrees of freedom are used to orient the target point in the reference coordinate system . If the available degrees of freedom of the system exceed the number of variables in the task , From a kinematic point of view , The manipulator is redundant ( redundant ) Of .
Two 、 Serial manipulator
In the mechanical hand , The task of the arm is to meet the positioning requirements of the wrist , Then the wrist can meet the orientation requirements of the end effector . Start at the base joint , It can be done according to the type and order of the arms , Divide the manipulator into Cartesian type ( Cartesian )、 Cylindrical ( cylindrical )、
Ball shape ( spherical ), SCARA Type and anthropomorphic ( anthropomorphic ) etc. .
 |  |
| a Cartesian manipulator | b Cylindrical manipulator |
 |  |
| c Spherical manipulator | d SCARA Type a mechanical arm |
1. Cartesian manipulator
The geometric configuration of Cartesian manipulator is realized by three moving joints , Its characteristic is that its three axes are perpendicular to each other ( chart 1.2). From a geometric point of view , Each degree of freedom corresponds to a Cartesian space variable , Therefore, it is natural to complete linear motion in space . Cartesian structure can provide good mechanical rigidity . The positioning accuracy of the wrist in the workspace is constant everywhere . This is the workspace composed of cuboids , As shown in the figure above a Shown . Because all joints are moving joints , Therefore, the structure has high accuracy , But less flexible . To manipulate the target , Need to approach the target from the side . On the other hand , If you want to get close to the target from the top , Descartes manipulator can pass through gantry ( gantry ) Structure implementation , As shown in the figure below .

Cartesian manipulator is often used for grasping and assembling materials .
2. Cylindrical manipulator
The difference between cylindrical manipulator and Cartesian manipulator lies in that the first moving joint is replaced by rotating joint . Cylindrical structure provides good mechanical stiffness , The positioning accuracy of the wrist is reduced , The horizontal movement ability is improved .
The working space of cylindrical manipulator is a part of hollow cylinder . Because the cylindrical manipulator has a horizontal moving joint , The wrist of the cylindrical manipulator is suitable for operating the workpiece in the horizontal direction .
meanwhile , Cylindrical manipulator is mainly used to transport large workpieces smoothly , In this case, it is more appropriate to use hydraulic drive than motor drive .
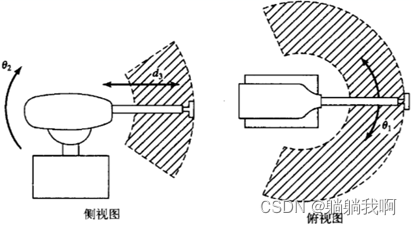
3. Spherical manipulator
The difference between the spherical manipulator and the cylindrical manipulator is that the second moving joint is replaced by the rotating joint . The mechanical strength of spherical manipulator is lower than that of Cartesian manipulator and cylindrical manipulator , The mechanical structure is more complicated .
The radial operation ability of the spherical manipulator is strong , Its workspace is part of a hollow sphere .
The joints of spherical manipulators are usually driven by electric motors .
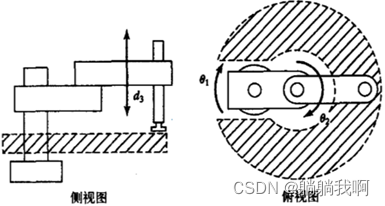
4.SCARE Mechanical arm
World's first SCARE The manipulator is Yamanashi University, Japan (University of Yamanashi) Makino ocean (Hiroshi Makino) On 1978 From R & D in ,SCARA It is a compliant assembly robot arm (Selective Compliance Assembly Robot Arm) English abbreviations .
SCARE The special mechanical structure of the manipulator makes all the moving axes parallel , This makes it highly stable for vertical operation and superior flexibility for horizontal loading .
SCARE The manipulator is suitable for manipulating small targets , The joints are driven by electric motors .
5. Anthropomorphic manipulator
The geometric configuration of humanoid manipulator is realized by three rotating joints . The rotation axis of the first joint is perpendicular to the rotation axis of the other two joints , The rotation axes of the other two joints are parallel , As shown in the figure below . Because its structure and function are similar to the human arm , Correspondingly, the second joint is called the shoulder joint , The third joint connects the arm and forearm , So it is called elbow joint . The structure of humanoid manipulator is the most flexible one , Because all its joints are rotational . On the other hand , There is no correspondence between the degrees of freedom of the humanoid manipulator and the Cartesian space variables , Therefore, the positioning accuracy of the wrist varies in the workspace . The workspace of the humanoid manipulator is similar to a part of the spherical space , Compared with its burden , The volume of the workspace is large . Its joints are usually driven by electric motors . Humanoid manipulator has a wide range of industrial applications .

3、 ... and 、 Parallel manipulator
边栏推荐
猜你喜欢

leetCode-498: 对角线遍历

2022年智能机器人与系统国际研讨会(ISoIRS 2022)

Flink checkpoint and savepoint

Outils de capture de paquets

JMeter接口测试工具基础— 使用Badboy录制JMeter脚本

How can I solve the problem that the swiper animation animation fails when switching between left and right rotations of the swiper?

Leetcode-2221: triangular sum of arrays

SQL Server AVG function rounding

Appium automation test foundation - mobile end test environment construction (I)

23. Opencv——图像拼接项目
随机推荐
跨域概述,简单积累
Normal equation
多线程的应用 - 提升效率
线程的 sleep() 方法与 wait() 方法的区别
Wechat applet rich text picture width height adaptive method introduction (rich text)
记录一下MySql update会锁定哪些范围的数据
用扫描的方法分发书稿校样
Six states of threads
【资源分享】2022年环境工程与生物技术国际会议(CoEEB 2022)
微信小程序rich-text图片宽高自适应的方法介绍(rich-text富文本)
1.项目环境搭建
How to customize sharing links in wechat for H5 web pages
JMeter interface test tool foundation - badboy tool
线程池的状态
[ei sharing] the 6th International Conference on ship, ocean and Maritime Engineering in 2022 (naome 2022)
Role of message queuing
3.员工的增删改查
26.删除有序数组的重复项
Illustration miscellaneous [for archiving to prevent loss]
Leetcode interview question 01.05: primary editing