当前位置:网站首页>相干声呐GeoSwath的综述
相干声呐GeoSwath的综述
2022-06-22 05:51:00 【xiaokcehui】
依据惯例,结论如下:
(1)GeoSwath获取回波的强度、相位差和时间,继而得到水深和声呐图像,Klein3000仅获取回波的强度,只能得到声呐图像。
(2)由于GeoSwath采取侧挂固定安装测量,Klein3000采取拖拽式,因此,GeoSwath适合于小于200m的浅水,Klein3000作业水深可达2000m,GeoSwath的声呐图像没有Klein3000细腻,但是定位比Kein3000更为准确。
(3)GeoSwath探头正下方的数据比较稀疏, 探头两侧的数据较密集, 加强了外缘的水平分辨率,传统型多波束测深系统探头下方数据密集, 两侧的数据随脚印的增大逐渐变稀, 分辨率迅速下降,水深准确度都是中央波束比外侧波束高。
(4)相干声纳多波束测深系统 Geoswath plus 更适合在 200m 以浅的简单平坦的区域下, 如内河航道、水库大坝、海洋考古或是找寻管道等探测上, 传统多波束测深系统 Seabeam 1180 更适合应用于地形复杂的区域, 工作水深最深可以到 500—600m。
GeoSwath与Klein3000的综合对比及实验分析_张济博-2015
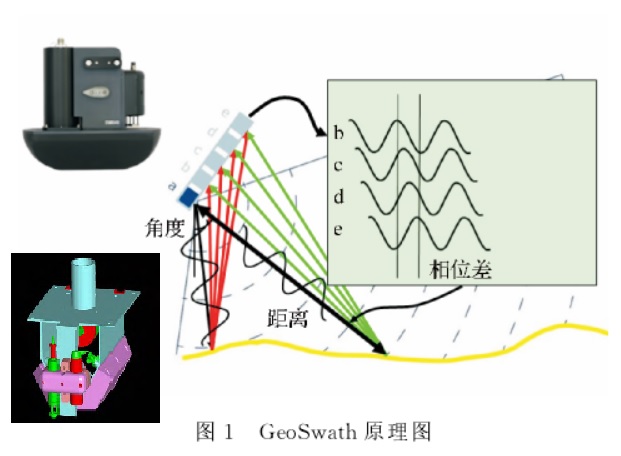
GeoSwath Plus是英国GeoAcoustics Ltd 公司的产品,有3种类型,发射频率分别为125、250和500KHz,本 文 选 用 125KHz的,因 为 该 系 统 应 用 最 广泛,其它两种类型与其相似,只是分辨率和量程不同。GeoSwath Plus由左右两个换能器组成,呈“V”字型,每组换能器由1个发射基元和4个接收基元组成,与竖直方向夹角为30°,单边波束开角为120°。换能器发射扇形声波,海底的回波信号被接收器接收,振幅形成声纳图像,4个接收板接收到回波信号的相位是不同的,接收基元之间的间距是固定的,根据相干原理,它们接收的回波相位差和波束到达角存在固定的关系,进而计算出到达角的大小,通过横摇补偿,结合记录的波束传播时间即可进行深度与横向位置的计算(图1)
{kind=link}
Klein3000双频数字侧扫声纳系统由发射换能器和接收换能器组成,该系统包含左舷和右舷两个换能器阵,每 个 换 能 器 阵 分 为 100KHz和 500KHz两个收发器,每个收发器包括1个发射基元和2个接收基元。系统工作时,随船行进的拖鱼产生两束与船前进方向垂直的扇形声束,遇到海底或者水中物体时发生散射,反向散射波沿原传播路线返回,被换能器接收,反映在记录纸或者显示器上,形成声纳图像(图2)。
正在上传…重新上传取消
二者区别在于传统声纳 Klein3000只记录回波的振幅,而相干声纳GeoSwath则记录回波的振幅、回波时间和相位差,通过数据处理得到水深数据和声纳图像,二者接收数据的不同,也决定了两者的用途不同。
传统侧扫声纳Klein3000系统和相干声纳GeoSwath Plus系统的基本参数对比如表1所示。
{kind=link}
正在上传…重新上传取消
由于受到回波强度的限制,GeoSwath Plus适用于水深不超过200m的浅水区,而Klein3000由于采用拖拽式,可以在不超过2000m的海域范围内使用,使用范围比GeoSwath Plus大;传统侧扫声纳采用拖拽式安装,而GeoSwath Plus采用固定式安装,同时由于GeoSwath Plus安装了高度计等设备可以更好地保证仪器的安全。
实测数据对比
在某海区对GeoSwath Plus和Klein3000进行对比实验,该区域水深约40m。GeoSwath Plus安装在船舷右侧,Klein3000采用拖拽式安装,使用电动绞车收放缆,使其离海底高度控制在20m左右。
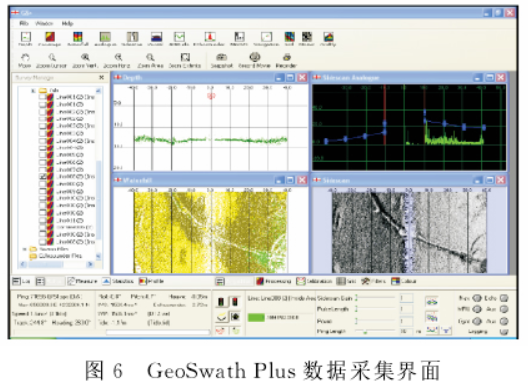
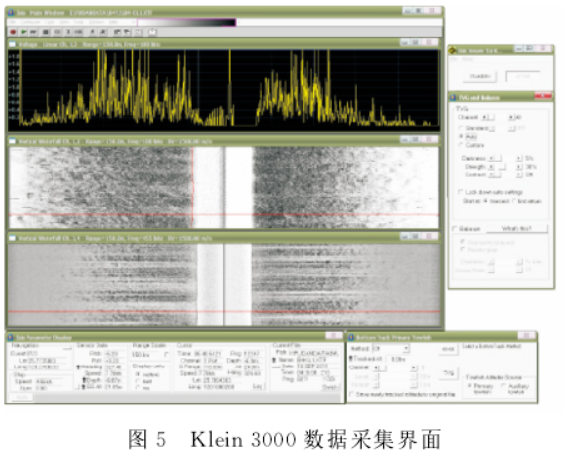
GeoSwath Plus使 用GS+软 件,Klein3000使 用SonarPro软件进行数据采集。导航设备选用C-Nav3050M DGPS系统,坐标系选用WGS84,使用UTM投影,网格大小设为0.25m。为了能够尽可能更好地比较两者所采集的数据,处理软件都选用 Trition IsIs和TritonMap,以避免因使用不同的处理软件造成差异。在实验区布设2条3km长的测线,其中1条东西向测线用来探测海底冲刷沟,另1条南北向测线用来探测海底基岩,用同1条船分别使用 Klein3000和GeoSwath Plus进行探测。
{kind=link}
{kind=link}
{kind=link}
数据量比较数据采集完成后,发现同样距离 Klein3000的数据文件几乎为 GeoSwath Plus的8 倍,分析后发现,两者都是每秒钟发射10ping,但 Klein3000每 ping单侧采样点数为2048个,GeoSwath Plus只有1024个;此外由于 Klein3000是100KHz和500KHz双频采集,GeoSwath Plus只是125KHz单频采集,故文件大小只有 Klein3000的1/8左右。
声纳图像质量分析
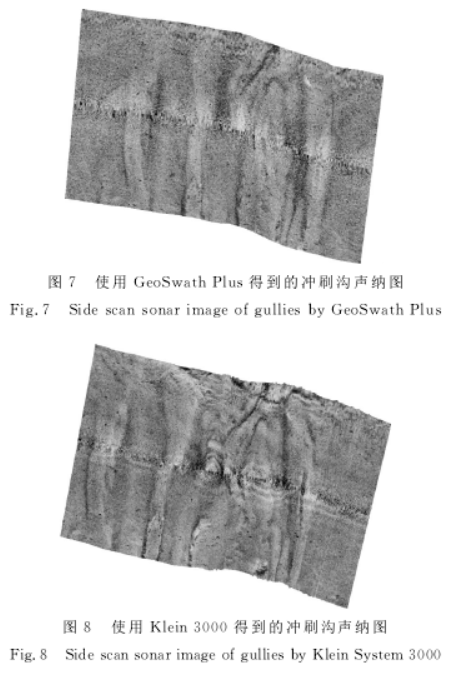
图7和图8分别为 GeoSwath Plus和 Klein3000所探测到的海底冲刷沟,从 GeoSwath Plus得到声纳图上只能看出冲刷沟的大致形状和走向;而 Klein3000得到的声纳图不仅能看到冲刷沟的大致形状和走向,而且能够更加细致清晰地显示冲刷沟的细节和形状。
{kind=link}
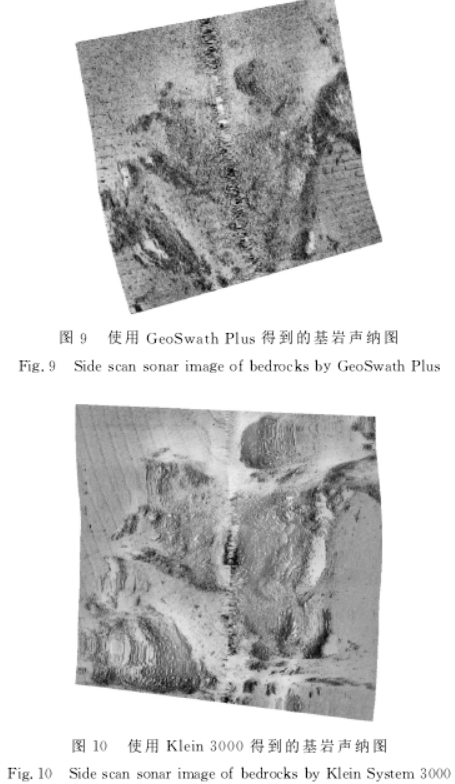
图9和 图10分 别 为 GeoSwath Plus 和 Klein3000探测得 到 的 海 底 基 岩,从 GeoSwath Plus得 到的声纳图上,看到图像只能显示出基岩,无法清晰地显示基岩的形状;而 Klein3000得到的声纳图不仅能识别出基岩,而且能够更加细致清晰地显示基岩的分布、形状和细节。
{kind=link}
目标大小与位置分析
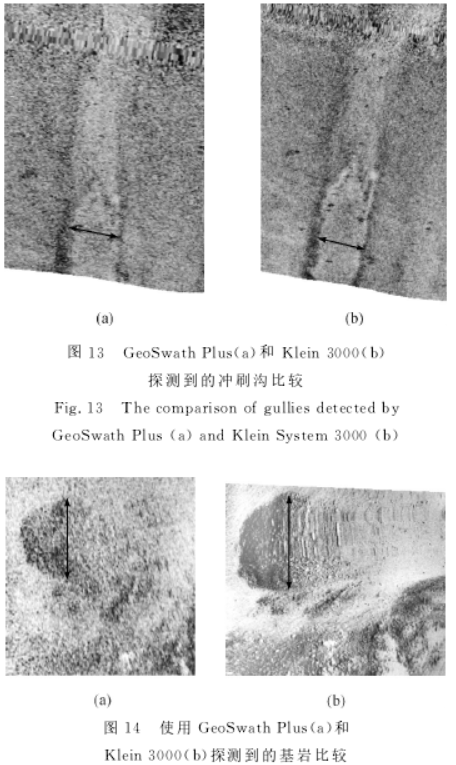
GeoSwath Plus探测到的冲刷沟宽度为20.4m(图13a),基 岩 区 的 宽 度 为26.7 m(图14a),Klein3000得到的冲刷沟宽度为19.9m(图13b),基岩区的宽度 为29.3m(图14b),从以上数据可以看出GeoSwath Plus和 Klein3000 得到的冲刷沟宽度相差较小,而基岩区 的 宽 度 相 差 较 大,主要是因GeoSwath Plus得到的声纳图对比度和清晰度不如Klein3000,没有找到基岩区的边缘,所以测量基岩区宽度较小。
正在上传…重新上传取消
Klein3000得到冲刷沟和基岩位置与GeoSwath Plus得到的位置分别相差9.3m 和8.7m,这是传统侧扫声纳的固有问题,虽然使用电动绞车控制拖鱼离海底高度,并进行Layback改正,但是定位精确度仍较低,而 GeoSwath Plus采用固定式安装,定位精度更高。
{kind=link}
结论
本文将 GeoSwath Plus系统和 Klein3000系统从工作原理、技术参数、数据采集和后处理平台以及实测数据等方面进行了对比,得到以下结论:
(1)由于记录的数 据 类 型 存 在 差 异,Klein3000只记录回 波 的 振 幅,而GeoSwath Plus 则 记 录 回 波 的 振幅、回波时间和相位差,因而GeoSwath Plus不 仅能够得到声纳图像,还能获取每个点的精确位置与水深值。而 Klein3000侧扫声纳无法获取每个图像点的精确位置与水深值,由此也决定了两种设备在用途上有着很大的区别。
(2)二者质量较轻,都属于便携式,由于GeoSwath Plus采用固定式安装,受到回波强度的限制,只适用于水深不超过200m的浅水区;而 Klein3000由于采用拖拽式,可在不超过2000m的海域范围内使用,使用范围更大。
(3)在数据采集平台方面,由于 Klein3000出现更早,可使用的采集软件更多,而 GeoSwath Plus可以使用的采集软件较少,但具有更直观的数据质量监控功能;在后处理平台方面,两者都有较多的软件可供选择,由于数 据 文件中含有水深数据,GeoSwath Plus对后处理软件的要求更高。
(4)从实际应用来看,由于固有的原因,在不使用USBL的情况下,Klein3000的定位精度低于GeoSwath Plus,但得到的声纳图像更细腻,分辨率更高,目标更清晰。
相干声纳多波束与传统型多波束测深系统综合对比与实验分析_邢玉清-2011
目前主流的多波束测深系统从原理上可以分为两类: 1)传统型多波束测深系统; 2)相干声纳多波束测深系统。这两种类型在性能、可靠性等方面分别有那些特点?本文以传统型多波束测深系统 Seabeam 1180和相干声纳多波束测深系统 Geoswath Plus为例, 比较两者之间的异同, 为多波束测深系统的引进和选型提供参考。
工作原理
传统型多波束测深系统由发射换能器和接收换能器组成, 呈扇形发射和接收多个波束的声能信号, 通过在特定角度下测量反射(散射)信号往返时间的方法 , 得 到对应不同角度的多个水深数据 。 以Seabeam 1180 为例, 该系统包含左舷和右舷两个换能器阵, 每个阵包括 32 个基元, 所有基元都参与发射, 每个阵同时发射 7 个波束; 16 个基元参加接收, 波束形成接收器计算 7 个接收方向, 由海底搜寻器计算上述波束方向的水深剖面, 从而得到水深地形数据。
相干声纳多波束测深系统是由侧扫声纳发展而成, 计算水深的方法基于在特定时间下测量反射(散射)回波信号的角度。相当于布置一系列侧扫声纳的换能器, 利用电子技术给出垂面上的相位变化。这种相位信息可以确定反射(散射)声波的接收角度和返回脉冲的走时, 用不同接收换能器信号间的时间差(相位差)计算信号角度, 得到斜距或角度测量结果。以 Geoswath Plus 为例, 该系统也包含两个换能器, 每个换能器包括1个发射单元和4个接收单元。在宽阔的垂直开角范围内, 进行时序连续的角度测量。
二者原理上的主要区别在于, 传统多波束测深系统是在特定角度测量反射(散射)信号的往返时间; 而相干声纳多波束测深系统是在特定时间测量反射(散射)回波信号的角度。
发射接收模式对比
传统多波束测深系统 Seabeam1180 采用旋转定向发射(rotational directional ransmission, 简称 RDT)技术。在一个测深周期有 14 个波束同时发射, 接收波束形成器在每个发射方向计算出 3 个波束, 每个波束角为 1.5°, 相邻波束中心间隔 1.25°, 以上发射
接收过程共 3 组, 即系统按序发射接收 3 次完成一个完整测深周期, 在波束发射和接收过程中实时进行横摇补偿。RDT 技术的运用使得系统得以发射和接收产生较窄的波束角宽以及大于 36d B 的旁瓣抑制, 从而获得较高的分辨率。
而作为相干声纳多波束测深系统的 Geoswath Plus, 在波束发射上不存在实际定向波束 , 离散的波束并非通过物理方式形成, 而是由信号处理器利用接收缓存中的数据来生成波束。波束的方向是由接收阵列信号旅行时和相位差来决定的。相干多波束测深系统通过检测每个海底信号点到不同换能器单元的传播延时来估算各点的距离和方位角, 通过电子单元检测信号的相位差, 然后把相位差转换成与换能器法线方向的夹角。因此, 这里的“波束”并没有实际物理意义, 更多的是一种数学运算过程, 理论上可以计算出无限波束数。
分辨率对比
多波束测深系统以一定频率向海底发射波束, 这些波束沿航迹方向窄而沿垂直航迹方向宽, 形成一个扇形传播区。接收波束横跨与船龙骨垂直的发射扇区, 垂直航迹方向波束窄。发射波束与接收波束的交叉区域, 也就是一个波束在海底照射的面积, 即为多波束的“脚印”, 是衡量多波束测深系统分辨率的一项重要指标。
传统多波束测深系统使用复杂的换能器阵(包括常规信号处理), 利用−3d B 的接收信号生成“脚印”, 波束角从 0.5°到 6°不等, 水平分辨率取决于波束开角。波束的数量和独立的采样数据可以多至 240个。整体覆盖角通常在 120°到 150°之间, 从而使最大的波束宽度为水深的 4 到 7 倍。如 Seabeam 1180开角为 1.5°, 波束数为126 个, 整体覆盖角为 153°。因此其水平分辨角为 1.5°, 对应的中央波束分辨率最高, 分辨率向两侧逐渐降低。如在水深 100m 的平坦海底, 覆盖宽度可达 800m, 中央波束的水平分辨率为 2.6m, 边缘波束分辨率增至 40m。
而相干声纳多波束测深系统沿航迹方向分辨率取决于在该方向上的发射波束开角, 垂直航迹方向的分辨率则取决于采样率, 其越靠波束外侧波束的检测越稳健, 并且可以提供等脚印水深分辨率, 因此相干声纳多波束测深系统在浅水测量中不存在分辨率随发射扇区开角增大而增大的问题, 在条带的边缘依然有很高的数据密度。如 Geoswath Plus 在沿航线的方向上分辨率为 0.9°,在垂直于航线方向分辨率为 0.02°。即在水深 100m 时, Geoswath Plus 的分辨率为 1.6m(沿航迹)×0.03m(垂直航迹)。
二者采集数据密度的区别是: 传统多波束测深系统正对探头下方的数据最密, 两侧数据较中间稀疏。相干声纳则相反, 正对探头下方的数据最稀疏, 两侧数据较密集。在采集的数据量上, 传统多波束测深系统 Seabeam 1180 数据量较小, 而相干声纳多波束测深系统 Geoswath Plus 获得的数据量相当大。如在水深 20m 时, Seabeam 1180 每 Ping 生成 126 个水深点, Geoswath Plus 每 Ping 生成 6800 个水深点。在水深 100m 时, Seabeam 1180 点数不变, 每 Ping 仍为 126 个水深点, 而 Geoswath Plus 每 Ping 生成42000 个水深点。
相同点在于, 二者都存在越外侧的数据准确度越低的趋势, 都需要依靠高精度的运动传感器确定位置和姿态。
实测数据对比
2007—2008 年, 国家海洋局南海工程勘察中心对 南 海 北 部 进 行 多 波 束 调 查 , 其 间 在 北 部 湾 对Seabeam 1180 多波束系统和 Geoswath Plus 多波束系统进行了对比试验。
测深数据密度比较
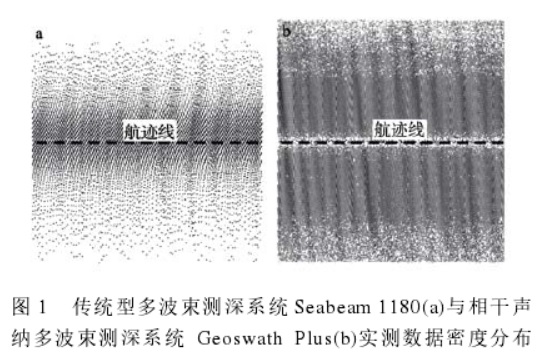
图 1 是传统多波束测深系统 Seabeam 1180 和相干声纳多波束测深系统 Geoswath Plus 所采集数据的数据密度分布示意图。虚线为作业船的航迹线, 虚线两侧为多波束测量的水深数据。图示海区平均水深为 15m, 传统多波束测深系统 Seabeam 1180覆盖宽度约为 150m, 中央水深数据较密集 , 两侧随着脚印的增大而逐渐稀疏, 最外侧脚印间隔最大约 5m。相干声纳多波束测深系统 Geoswath Plus 覆盖宽度约为 160m, 中央 5—10m 条带内水深数据较稀疏, 而两侧数据密度相对比较均匀, 最外侧脚印间隔最大约 2m。 由图 1 可以看出, 相干声纳多波束测深系统Geoswath Plus 在距航迹线较远的位置其数据密度更大, 水平分辨率更高; 而在航迹线附近的区域传统多波束测深系统 Seabeam 1180 的数据密度更大。
{kind=link}
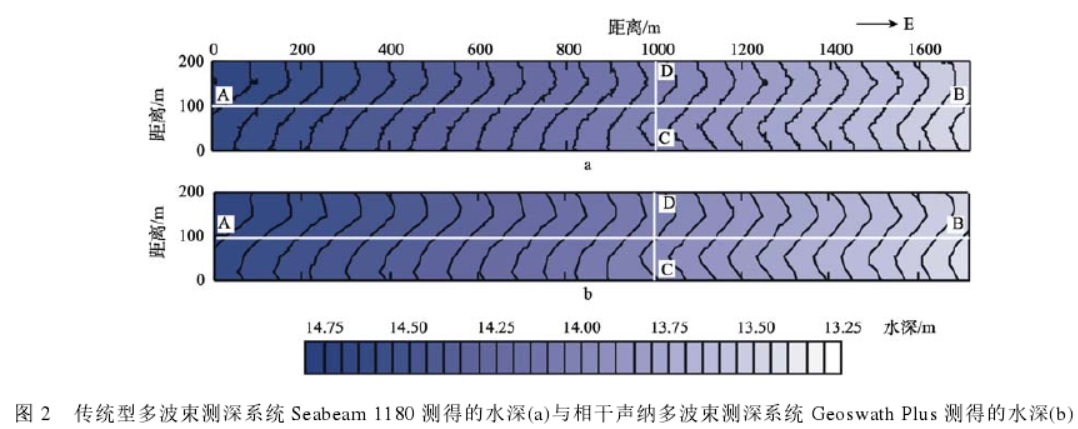
图 2 是传统多波束测深系统 Sea Beam1180 系统及相干声纳多波束测深系统 Geoswath Plus 系统在比测区全覆盖测量获得的地形图, 其水深值和变化趋势较为一致。分别在两系统测量获得的原始数据中, 查找位于地形剖面 A—B、C—D 上的水深数据点, 利用连续的水深数据点绘制地形剖面图, 如图3、图 4。
正在上传…重新上传取消
{kind=link}
结论
1) 两套多波束系统的工作原理完全不同。传统多波束测深系统 Seabeam 1180 采用 RDT 模式进行波束发射, 获得波束有限; 而相干声纳多波束测深系统Geoswath plus 不存在实际定向波束, 理论上可以计算出无限波束。
2) 在分辨率方面 , 传统型多波束测深系统探头下方数据密集, 两侧的数据随脚印的增大逐渐变稀, 分辨率迅速下降; 相干声纳多波束测深系统探头正下方的数据比较稀疏, 探头两侧的数据较密集, 加强了外缘的水平分辨率。
3) 在采集和后处理平台方面 , 相干声纳多波束测深系统 Geoswath Plus 采集和处理软件实现了一体化, 具有较直观的数据质量监控功能, 后处理操作简便; 传统多波束测深系统 Seabeam 1180 可应用的后处理软件较多, 功能更丰富。
4) 从目前浅水区实际测量结果来看 , 两套系统在数据测量精度上具有较好的一致性, 不符值数列的标准偏差为 3%—4%;
总的来说, 两套多波束系统都具备较好的测量精度, 可以满足各种复杂环境下的水深地形调查需要。传统多波束测深系统 Seabeam 1180 中央波束密集, 采集的数据量较小, 工作水深更大, 后期处理灵活, 但由于波束数固定, 随水深增加, 脚印间隔加大, 外缘数据密度小, 容易出现脚印效应; 而相干声纳多波束测深系统Geoswath Plus数据密度大, 在水平分辨率和覆盖宽度上更有优势, 可以减少测线布设, 提高外业测量效率。相干声纳多波束测深系统 Geoswath plus 更适合在 200m 以浅的简单平坦的区域下, 如内河航道、水库大坝、海洋考古或是找寻管道等探测上, 传统多波束测深系统 Seabeam 1180 更适合应用于地形复杂的区域, 工作水深最深可以到 500—600m。
小结
我们用过Klein3000和传统多波束,但没有用过GeoSwath,且是最近才看到这款设备。这款设备兼具多波束和侧扫声呐功能,从技术参数看,相当不错。那么,这款设备的效果究竟如何呢?于是在知网用关键字GeoSwath搜索了相关文献,有两篇文献吸引了我们的注意,一篇是GeoSwath和侧扫声呐的对比,一篇是GeoSwath与多波束的对比,即是本文上述的两篇文献。从两篇文献的对比结果,我们可以看出,GeoSwath在图像的分辨率和细腻程度上不如侧扫声呐,在水深测量的准确度上不如多波束,也就是说,GeoSwath虽兼具多波束和侧扫声呐功能,但是单项性能都不如专业设备,适合于某些特定的应用场景,比如水深较浅的内河航道或海湾浅滩。也许,这就是GeoSwath没有被广泛应用的原因吧。
图片不能加载,请看公-众-号
边栏推荐
- Assertion based validation
- Read and understand the four deep learning methods of supervised learning, unsupervised learning, semi supervised learning and intensive learning
- 402-字符串(题目:剑指Offer58-II.左旋转字符串、 28. 实现 strStr()、459.重复的子字符串)
- 格雷码与二进制的转换
- Market survey and future production and marketing demand analysis report of China's zinc oxide nanoparticle industry 2022-2027
- Flink核心功能和原理
- I2C interface
- Vulkan pre rotation processing equipment direction
- Ethernet communication protocol
- MFC Tab 控件添加 icon 图标
猜你喜欢

Simple use of idea plug-in easy code

reduce_sum()中的reduction_indices

【自己动手写CPU】异常相关指令的实现

401 string (344. reverse string, 541. reverse string II, Title: Sword finger offer 05. replace spaces, 151. reverse words in string)

C指針的理解

舰载机自动着舰控制系统研究

单球机器人动力学与控制研究

Signal output library

Server PHP related web page development environment construction

idea插件EasyCode的使用
随机推荐
U disk as startup disk to reinstall win10 system (no other software required)
不务正业系列7:老照片去除斑点手法
生信可视化(part4)--相关性图
单细胞论文记录(part14)--CoSTA: unsupervised convolutional neural network learning for ST analysis
vcpkg:If you are sure you want to rebuild the above packages, run the command with the --recurse opt
400-哈希表(1. 两数之和、454. 四数相加 II、383. 赎金信)
An unordered array of N integers. Find the first number after each element that is larger than it. The time complexity is O (n)
服务器php相关网页开发环境搭建
401 string (344. reverse string, 541. reverse string II, Title: Sword finger offer 05. replace spaces, 151. reverse words in string)
Vulkan 预旋转处理设备方向
Non transitive dice (spring daily question 51)
Server PHP related web page development environment construction
Unity app improves device availability
朗国科技助力OpenHarmony生态繁荣
格雷码与二进制的转换
基于断言的验证
Performance optimization best practices for reducing Game Size
MATLAB系统辨识
性能优化最佳实践之缩减游戏大小
vscode极简安装教程