当前位置:网站首页>【yolov4】基于yolov4深度学习网络目标检测MATLAB仿真
【yolov4】基于yolov4深度学习网络目标检测MATLAB仿真
2022-06-26 06:41:00 【fpga和matlab】
YOLO发展至YOLOv3时,基本上这个系列都达到了一个高潮阶段,很多实际任务中,都会见到YOLOv3的身上,而对于较为简单和场景,比如没有太密集的目标和极端小的目标,多数时候仅用YOLOv2即可。除了YOLO系列,也还有其他很多优秀的工作,比如结构同样简洁的RetinaNet和SSD。后者SSD其实也会常在实际任务中见到,只不过就性能而言,要略差于YOLOv3,当然,这也是因为SSD并没有去做后续的升级,反倒很多新工作如RFB-Net、DSSD等工作都将其作为baseline。论性能,RetinaNet当然是不输于YOLOv3的,只是,相较于YOLOv3,RetinaNet的一个较为致命的问题就是:速度太慢。而这一个问题的主要原因就是RetinaNet使用较大的输出图像尺寸和较重的检测头。
yolov4的创新点
1.输入端的创新点:训练时对输入端的改进,主要包括Mosaic数据增强、cmBN、SAT自对抗训练
2.BackBone主干网络:各种方法技巧结合起来,包括:CSPDarknet53、Mish激活函数、Dropblock
3.Neck:目标检测网络在BackBone和最后的输出层之间往往会插入一些层,比如Yolov4中的SPP模块、FPN+PAN结构
4.Head:输出层的锚框机制和Yolov3相同,主要改进的是训练时的回归框位置损失函数CIOU_Loss,以及预测框筛选的nms变为DIOU_nms
通俗的讲,就是说这个YOLO-v4算法是在原有YOLO目标检测架构的基础上,采用了近些年CNN领域中最优秀的优化策略,从数据处理、主干网络、网络训练、激活函数、损失函数等各个方面都有着不同程度的优化,虽没有理论上的创新,但是会受到许许多多的工程师的欢迎,各种优化算法的尝试。文章如同于目标检测的trick综述,效果达到了实现FPS与Precision平衡的目标检测 new baseline。
yolov4 网络结构的采用的算法,其中保留了yolov3的head部分,修改了主干网络为CSPDarknet53,同时采用了SPP(空间金字塔池化)的思想来扩大感受野,PANet作为neck部分。

yolov4在技术处理的思维导图:

1.MATLAB源码
clc;
clear;
close all;
warning off;
addpath(genpath(pwd));
%****************************************************************************
%更多关于matlab和fpga的搜索“fpga和matlab”的CSDN博客:
%matlab/FPGA项目开发合作
%https://blog.csdn.net/ccsss22?type=blog
%****************************************************************************
%% Download Pretrained Network
% Set the modelName from the above ones to download that pretrained model.
modelName = 'YOLOv4-coco';
model = helper.downloadPretrainedYOLOv4(modelName);
net = model.net;
%% Load Data
% Unzip the vehicle images and load the vehicle ground truth data.
unzip vehicleDatasetImages.zip
data = load('vehicleDatasetGroundTruth.mat');
vehicleDataset = data.vehicleDataset;
% Add the full path to the local vehicle data folder.
vehicleDataset.imageFilename = fullfile(pwd, vehicleDataset.imageFilename);
rng('default')
shuffledIndices = randperm(height(vehicleDataset));
idx = floor(0.6 * length(shuffledIndices));
trainingDataTbl = vehicleDataset(shuffledIndices(1:idx), :);
testDataTbl = vehicleDataset(shuffledIndices(idx+1:end), :);
% Create an image datastore for loading the images.
imdsTrain = imageDatastore(trainingDataTbl.imageFilename);
imdsTest = imageDatastore(testDataTbl.imageFilename);
% Create a datastore for the ground truth bounding boxes.
bldsTrain = boxLabelDatastore(trainingDataTbl(:, 2:end));
bldsTest = boxLabelDatastore(testDataTbl(:, 2:end));
% Combine the image and box label datastores.
trainingData = combine(imdsTrain, bldsTrain);
testData = combine(imdsTest, bldsTest);
helper.validateInputData(trainingData);
helper.validateInputData(testData);
%% Data Augmentation
augmentedTrainingData = transform(trainingData, @helper.augmentData);
augmentedData = cell(4,1);
for k = 1:4
data = read(augmentedTrainingData);
augmentedData{k} = insertShape(data{1,1}, 'Rectangle', data{1,2});
reset(augmentedTrainingData);
end
figure
montage(augmentedData, 'BorderSize', 10)
%% Preprocess Training Data
% Specify the network input size.
networkInputSize = net.Layers(1).InputSize;
preprocessedTrainingData = transform(augmentedTrainingData, @(data)helper.preprocessData(data, networkInputSize));
% Read the preprocessed training data.
data = read(preprocessedTrainingData);
% Display the image with the bounding boxes.
I = data{1,1};
bbox = data{1,2};
annotatedImage = insertShape(I, 'Rectangle', bbox);
annotatedImage = imresize(annotatedImage,2);
figure
imshow(annotatedImage)
% Reset the datastore.
reset(preprocessedTrainingData);
%% Modify Pretrained YOLO v4 Network
rng(0)
trainingDataForEstimation = transform(trainingData, @(data)helper.preprocessData(data, networkInputSize));
numAnchors = 9;
[anchorBoxes, meanIoU] = estimateAnchorBoxes(trainingDataForEstimation, numAnchors);
% Specify the classNames to be used in the training.
classNames = {'vehicle'};
[lgraph, networkOutputs, anchorBoxes, anchorBoxMasks] = configureYOLOv4(net, classNames, anchorBoxes, modelName);
%% Specify Training Options
numEpochs = 90;
miniBatchSize = 4;
learningRate = 0.001;
warmupPeriod = 1000;
l2Regularization = 0.001;
penaltyThreshold = 0.5;
velocity = [];
%% Train Model
if canUseParallelPool
dispatchInBackground = true;
else
dispatchInBackground = false;
end
mbqTrain = minibatchqueue(preprocessedTrainingData, 2,...
"MiniBatchSize", miniBatchSize,...
"MiniBatchFcn", @(images, boxes, labels) helper.createBatchData(images, boxes, labels, classNames), ...
"MiniBatchFormat", ["SSCB", ""],...
"DispatchInBackground", dispatchInBackground,...
"OutputCast", ["", "double"]);
% Convert layer graph to dlnetwork.
net = dlnetwork(lgraph);
% Create subplots for the learning rate and mini-batch loss.
fig = figure;
[lossPlotter, learningRatePlotter] = helper.configureTrainingProgressPlotter(fig);
iteration = 0;
% Custom training loop.
for epoch = 1:numEpochs
reset(mbqTrain);
shuffle(mbqTrain);
while(hasdata(mbqTrain))
iteration = iteration + 1;
[XTrain, YTrain] = next(mbqTrain);
% Evaluate the model gradients and loss using dlfeval and the
% modelGradients function.
[gradients, state, lossInfo] = dlfeval(@modelGradients, net, XTrain, YTrain, anchorBoxes, anchorBoxMasks, penaltyThreshold, networkOutputs);
% Apply L2 regularization.
gradients = dlupdate(@(g,w) g + l2Regularization*w, gradients, net.Learnables);
% Determine the current learning rate value.
currentLR = helper.piecewiseLearningRateWithWarmup(iteration, epoch, learningRate, warmupPeriod, numEpochs);
% Update the network learnable parameters using the SGDM optimizer.
[net, velocity] = sgdmupdate(net, gradients, velocity, currentLR);
% Update the state parameters of dlnetwork.
net.State = state;
% Display progress.
if mod(iteration,10)==1
helper.displayLossInfo(epoch, iteration, currentLR, lossInfo);
end
% Update training plot with new points.
helper.updatePlots(lossPlotter, learningRatePlotter, iteration, currentLR, lossInfo.totalLoss);
end
end
% Save the trained model with the anchors.
anchors.anchorBoxes = anchorBoxes;
anchors.anchorBoxMasks = anchorBoxMasks;
save('yolov4_trained', 'net', 'anchors');
%% Evaluate Model
confidenceThreshold = 0.5;
overlapThreshold = 0.5;
% Create a table to hold the bounding boxes, scores, and labels returned by
% the detector.
numImages = size(testDataTbl, 1);
results = table('Size', [0 3], ...
'VariableTypes', {'cell','cell','cell'}, ...
'VariableNames', {'Boxes','Scores','Labels'});
% Run detector on images in the test set and collect results.
reset(testData)
while hasdata(testData)
% Read the datastore and get the image.
data = read(testData);
image = data{1};
% Run the detector.
executionEnvironment = 'auto';
[bboxes, scores, labels] = detectYOLOv4(net, image, anchors, classNames, executionEnvironment);
% Collect the results.
tbl = table({bboxes}, {scores}, {labels}, 'VariableNames', {'Boxes','Scores','Labels'});
results = [results; tbl];
end
% Evaluate the object detector using Average Precision metric.
[ap, recall, precision] = evaluateDetectionPrecision(results, testData);
% The precision-recall (PR) curve shows how precise a detector is at varying
% levels of recall. Ideally, the precision is 1 at all recall levels.
% Plot precision-recall curve.
figure
plot(recall, precision)
xlabel('Recall')
ylabel('Precision')
grid on
title(sprintf('Average Precision = %.2f', ap))
%% Detect Objects Using Trained YOLO v4
reset(testData)
data = read(testData);
% Get the image.
I = data{1};
% Run the detector.
executionEnvironment = 'auto';
[bboxes, scores, labels] = detectYOLOv4(net, I, anchors, classNames, executionEnvironment);
% Display the detections on image.
if ~isempty(scores)
I = insertObjectAnnotation(I, 'rectangle', bboxes, scores);
end
figure
imshow(I)
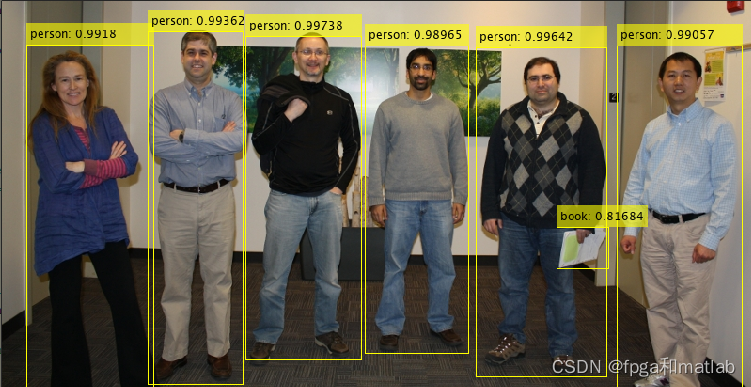
2.yolov4仿真效果




资源
边栏推荐
- I have been testing at Tencent for several years
- Load balancer does not have available server for client: userservice problem solving
- 温度报警器
- Kotlin Compose 状态恢复 rememberSaveable 与 remember
- Lightgbm-- parameter adjustment notes
- OCA Security Alliance (cybersecurity mesh)
- 自顶向下的变成方法
- Reasons why MySQL indexes are not effective
- Jasminum plug-in of Zotero document management tool
- C nuget offline cache package installation
猜你喜欢

Jasminum plug-in of Zotero document management tool

温度报警器

Container with the most water

Vulnerability discovery - API interface service vulnerability probe type utilization and repair

MySQL

vs code 使用 prettier 格式化 js 的时候, 函数定义的名称和括号之间有一个空格, 而 eslit 又不允许这个空格.

Kotlin compose state recovery remembersaveable and remember

Marketing skills: compared with the advantages of the product, it is more effective to show the use effect to customers

Evolution history of qunar Bi platform construction
When vs code uses prettier to format JS, there is a space between the name of the function definition and the parentheses, and ESLIt does not allow this space
随机推荐
Unsatisfied dependency expressed through field ‘baseMapper‘; nested exceptio
Load balancer does not have available server for client: userservice problem solving
Play with a variety of application scenarios and share secrets with Kwai MMU
How to transfer database data to check box
数据挖掘是什么?
View analysis
[micro service series] protocol buffer dynamic analysis
成水最多的容器
温度报警器
Vulnerability discovery - API interface service vulnerability probe type utilization and repair
Installation and login of MySQL database
面试官:测试计划和测试方案有什么区别?
Gof23 - builder mode
Pychart cannot run designer Exe (this application failed to start because no Qt platform plugin could be I appears)
A new paradigm for large model application: unified feature representation optimization (UFO)
The four cores of the browser: Trident, gecko, WebKit, blink
When vs code uses prettier to format JS, there is a space between the name of the function definition and the parentheses, and ESLIt does not allow this space
Alarm operation and Maintenance Center | build an efficient and accurate alarm collaborative processing system
Decision tree learning notes
Thinking skills of technical leaders