当前位置:网站首页>计组-总复习
计组-总复习
2022-06-24 10:20:00 【Schwertlilien】
总复习
前言
里面记录的知识点基本在考试范围,考柿不考的知识点有很多没有写。面向考试。
建议大家配合习题食用。
标的确实是考过的,但是标得不是很全。然后越多,表示我认为它还是比较重要的。

(一)绪论
1. 计算机的发展
现代计算机的理论基础:布尔代数、物质基础:双稳态触发器。
1946年,美国,ENIAC,电子数字积分和计算机
1946年6月,冯·诺伊曼提出以二进制,程序存储和程序控制为核心的思想,奠定了当代电子数字计算机体系结构的基础。
- 1946-1954年,第1代,电子管计算机,ENIAC、IBM 701
- 1955-1964年,第2代,晶体管计算机,IBM 7030、Univac LARC
- 1965-1974年,第3代,集成电路计算机,IBM 360、370、DEC PDP-8
- 1975-1990年,第4代,超大规模集成电路计算机,IBM 3090、VAX 9000、PC机、苹果机
- 1991-,第5代,多核处理器(4核和8核)
2. 计算机的基本组成

这是去年的考题!!!
冯·诺伊曼机的硬件固定,不同的运算功能依靠预先放在存储器中的程序实现,这是存储程序控制的基本原理,也是区别其他运算工具的关键。

计算机的软件:
- 计算机语言:机器语言、汇编语言、高级语言
- 软件分类:系统软件、应用软件、中间件
3. 计算机的层次结构

4. 计算机的分类
按照规模和功能分类:
巨型机、大型机、中型机、小型机、微机、单片机
按用途分类:
通用机(如:PC机)、专用机(如:嵌入式计算机)
按信息处理的特性分类:(FLYNN)费林分类法
- 单指令流单数据流计算机(SISD)
- 单指令流多数据流计算机(SIMD)
- 多指令流单数据流计算机(MISD)
- 多指令流多数据流计算机(MIMD)
Flynn分类法:按照计算机在执行程序的过程中信息流的特征进行分类的。

5. 计算机的性能描述
(个人认为可能概率会出题)
- MIPS:每秒钟执行指令的百万条数
- MFLOPS:每秒钟执行浮点数的百万次操作的数量
- CPI:每条指令执行所用的时钟数
- N:每条指令执行所用的时钟数
- f C L K f_{CLK} fCLK:时钟频率


(二)计算机中的数据表示


1. 不同编码的比较
- 真值为 + :原码、补码、反码的表示形式均相同。
- 真值为 - :原码、补码、反码的表示形式不同。
- 特殊的移码: 0 表示真值是负数; 1 表示真值是正数。
0有唯一的编码:补码、移码。
原码:1000 0000 | 0000 0000
反码:1111 1111 | 0000 0000
符号位用0表示正、用1表示负:原码、反码、补码
移码:1表示正、0表示负
满足真值大则码值大:移码
最高位符号位1为负数(真值小码值小):原码、反码、补码
存在负值的真值越大码值越小:原码
【-1】补=【1000 0001】补=【1111 1111】可见是:最大的负值、最大的码值。
反码 = 补码 - 1、移码 = 补码最高符号位取反 因此均不是。
负数的码值大于正数的码值:原码、反码、补码
原理是:负数的码值最高位符号位为1
2. 浮点数
规格化指的是尾数的绝对值限定在$\frac{1}{2} ~ 1$之间。
若 M ≥ 0 M\ge0 M≥0: M = 0.1 X X . . . X M=0.1XX...X M=0.1XX...X是规格化数。
若 M < 0 M\lt0 M<0:由于 [ − 1 2 ] 补 = 1.1000...0 [-\frac{1}2]_{补}=1.1000...0 [−21]补=1.1000...0、 [ − 1 ] 补 = 1.000...0 [-1]_{补}=1.000...0 [−1]补=1.000...0。为了使计算机判断方便,一般不把 [ − 1 2 ] [-\frac{1}2] [−21]列为规格化的数,而把 [ − 1 ] [-1] [−1]列为规格化的数。 M = 1.0 X X X . . . X M=1.0XXX...X M=1.0XXX...X时,是规格化数。
貌似左规和右规都是在采用了双符号位,也就是变形补码后产生的。
左规:结果的尾数为 00.0 X X X . . . X 00.0XXX...X 00.0XXX...X或 11.1 X X X . . . X 11.1XXX...X 11.1XXX...X的形式时,需将尾数左移1位,阶码 -1,直到尾数为规格化形式为止。
右规:当浮点运算结果的尾数出现 01. X X X . . . X 01.XXX...X 01.XXX...X或 10. X X X . . . X 10.XXX...X 10.XXX...X的形式时,并不一定溢出,将尾数右移1位,阶码 +1,然后判断阶码是否溢出。



2.1 IEEE754

单精度格式:1+8+23(符号+阶码+尾数)

更多的重点还是放在单精度的浮点数上,至于双精度格式(1+11+52)只是被提了一下。
(三)运算方法和运算器
运算器用于数值运算及加工处理数据。
运算器的结构取决于:指令系统、数据的表示方法、运算方法以及所选用的硬件。
它由CPU中的ALU、GR(通用寄存器)等部件组成。
1. 定点数运算
1.1 加减
特别声明的是:求补运算
(主要用于 [ X ] 补 [ − X ] 补 [X]_{补}\leftrightarrow[-X]_{补} [X]补[−X]补 这种情况,对于符号位和数值位均按位取反,末位+1)
1.1.1 溢出判断
==只有当两个同符号的数相加(or 相异符号数相减),运算结果才可能溢出。==异号相加,永远不会产生溢出。
发生溢出时,运算结果肯定是错误的。防止溢出发生的最简单有效的方法即:增加补码的二进制编码长度。
我还想的是采用双符号位呢…不过双符号位并不能防止溢出,而是判断是否溢出。果然。
① 双符号位判决法(最常用)
补码采用两位表示符号,即00(+)和11(-)。
一旦发生溢出,则两个符号位就一定不一致。
- 出现01,结果 > +1
- 出现10,结果 < -1
所以01是上溢、10是下溢吗?
② 进位判决法
类似于双符号位,【最高数值位向符号位的进位】 ⊕ \oplus ⊕【符号位的进位】
1.1.2 移码加减 [ X ] 移 ± [ Y ] 移 ≠ [ X ± Y ] 移 [X]_{移}\pm[Y]_{移}\ne[X\pm Y]_{移} [X]移±[Y]移=[X±Y]移

1.2 乘
1.2.1 原码一位乘

对于原码二位乘,只需了解(我认为意思是不会考)。
1.2.2 补码一位乘(Booth法)

\\\\
1.3 除
1.3.1 原码一位除
① 恢复余数法

② 加减交替法

末位商如果为0,此时的余数是错误的。此时通过恢复余数码来得到正确的余数。

我觉得恢复余数法和加减交替法之间在计算过程中并无差异,主要是思想上的不同:恢复余数指的是不断减去除数,如果余数是负的,就要恢复余数为正的(加上除数),再不断减去除数;加减交替指看余数的正负,正的就减除数,负的就加除数。
1.3.2 补码一位除
这个是课后学习,但是出了一道关于这个的课后题。所以还是看看。

余数的校正规则:
- 若商为正:余数与被除数异号,余数+除数
- 若商为负:余数与被除数异号时,余数-除数
2. ALU
2.1 运算器的结构
基本组成包括算术逻辑单元ALU、暂存器、通用寄存器堆、内部总线。
2.1.1 标志寄存器、标志位
标志寄存器,又称状态寄存器。(我感觉状态寄存器更常用一点)用于保存ALU操作结果的某些状态。不同CPU,标志寄存器中包含的标志不尽相同。但是都会有如下最基本的5中标志位:
- ZF=1:结果全为0。
- CF=1:表示有进位或者是借位。
- OF=1:运算溢出。
- SF=1:运算结果为正数。(现代微机中,有符号数采用补码表示)
- PF=1:反映运算结果中‘1’的个数为偶数。
3. 浮点运算
3.1 浮点加减
①对阶:只有在两者的阶码相同时才能进行尾数的加减运算。其原则是小阶对大阶。也就是将小阶码(更小的数字挪到大数字的小数点处)
不断地右移获得阶码+1。==但是会在对阶时丢失尾数的低位,造成的误差相对较小。==但要是大阶对小阶,就会就是尾数的高位,导致错误的结果。
②尾数进行加减运算(直接相加或是加补)
③规格化:在进行完计算后可能得到的是一个非规格化数。则需要进行规格化。
(1)左规 ←
尾数是: 00.0 X X ⋅ ⋅ ⋅ X 00.0XX···X 00.0XX⋅⋅⋅X 或是 11.1 X X ⋅ ⋅ ⋅ X 11.1XX···X 11.1XX⋅⋅⋅X
左规时,尾数每左移一位,阶码减1,必须同时判断阶码是否减到比所能表示的阶码还小。
如果出现,阶码无法表示太小的阶码,就出现了下溢出。(下溢出发生可认为结果=0)
(2)右规 →
结果出现: 10. X X X ⋅ ⋅ ⋅ X 10.XXX···X 10.XXX⋅⋅⋅X 或是 $ {0}1.XXX···X$
表示尾数出现溢出,但并不代表整个结果浮点数溢出。
出现上述情况,可将尾数右移最多一次,阶码+1。
可能会出现阶码超出能表示的最大范围,发生上溢出。
④舍入处理:在对阶以及规格化的时候,需要将尾数右移,右移会丢弃尾数的最低位,出现了舍入的问题。一般采用以下三种方法。
(1)截断法:将需要丢弃的尾数低位丢弃。
(2)末位恒置1法:无论尾数右移丢弃的是0还是1,此法需要保证保留的尾数的最低位永远为1.
(3)0舍1入法:当尾数右移丢弃的是1,要保留的最末位+1,当丢弃0,保留的最末位不变。
(但是可能遇到01.1111111时发生溢出,因此需要使用截尾法。)
3.2 浮点乘除


(四)指令系统和汇编语言
1. 指令格式
设置指令系统的要求是:完备性、有效性、规整性、兼容性。
Huffman编码的主要缺点:
- 操作码长度很不规整,硬件编码困难。
- 与地址吗共同组成固定长的指令比较困难。
扩展编码方式
有等长15/15/15…扩展法 or 等长 8/64/512…扩展法。(只是众多扩展法之二)
- 是一种重要的指令优化技术:缩短指令平均长度、减少程序总位数和增加指令字所能表示的操作信息。
- 一般用在指令字长较短的微、小型机上。
2. 寻址方式
指令中以什么方式提供操作数或操作数地址,称为寻址方式(或是编址方式)。
以下是以8086/8088为例:

8088中,这些寄存器是16位的。

2.1 存储器寻址
将逻辑地址转化为物理地址(绝对地址)的计算公式:
物 理 地 址 = 段 寄 存 器 的 内 容 × 16 + 偏 移 地 址 物理地址=段寄存器的内容\times 16 + 偏移地址 物理地址=段寄存器的内容×16+偏移地址
相当于将对寄存器的内容左移4位,一个简单栗子如下:

2.2 8088CPU的寻址方式
8086/8088指令中说明操作数所在地址的寻址方式一共八种。
- 立即寻址:
MOV AX,2000H后面的操作数直接包含在指令中,放在代码段 - 寄存器寻址:
MOV AX,BX操作数在CPU内部的内部寄存器中 - 段寄存器寻址:
MOV AX,DS - 直接寻址:
MOV AX,[2000H]操作数放在存储器,操作数地址的16位段内偏移地址直接包含在指令中 - 寄存器间接寻址:
MOV AX,[BX]操作数放在存储器,段内偏移地址放在指针寄存器中 - 寄存器相对寻址:
MOV AX,disp[BX]存储器+指针寄存器+指令中相对偏移量 - 基址变址寻址:
MOV AX,[BX][SI]存储器+基址+变址(寄存器) - 基址变址相对寻址:
MOV AX,disp[BX][SI]存储器+基址+变址+指令中相对偏移量 - 隐含寻址:
MOV BL、CLC将操作数的地址隐含在指令操作码中
2.2.1 转移地址的地址方式
转移地址的寻址方式,也就是找出程序转移的地址(下一条指令的地址),而不是操作数。
8086/8088中,CS:IP为CPU当前==要(will)==读取的指令的地址,改变CS:IP中的内容就会程序转移。寻求转移地址的方法有:
- 段内直接(相对)转移
- 段内间接转移
- 段间直接转移
- 段间间接转移
2.2.1.1 段内转移(CS不变、IP改变)
段内直接转移(相对转移):new IP = IP + offset
- 短程转移:
offset是8位。 - 近程转移:
offset是16位。
段内间接转移:
程序转移的地址存放在寄存器or存储器单元,指令执行使用寄存器or存储器单元的内容来更新IP的内容。
e.g. JMP BX:IP ← BX
2.2.1.2 段间转移(CS、IP均改变)
段间直接转移:
指令码中直接给出【16位的段地址+16位的偏移地址】用以更新当前的 CS & IP。
段间间接转移:
由指令码的寻址方式字节求出存放转移地址的内存地址。其低位字中存放的是偏移地址,高位字中存放的是转移段基址。
2.2.1.3 分类
从应用角度分类(汇编语言):直接转移+间接转移
从原理角度分类(机器语言):段内转移+段间转移
3. PC指令系统
3.1 传送指令
MOV OPRD1,OPRD2:OPRD1 ← OPRD2
OPRD1:主存、寄存器、段寄存器**(除CS)**
OPRD2:立即数、段寄存器(含CS)、主存、寄存器

但是以下四种情况是不允许的:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-wI2XXFbW-1655777085968)(https://s3.bmp.ovh/imgs/2022/06/17/892e5a1302758829.png)]
3.2 交换指令
XCHG OPRD1,OPRD2:OPRD1 OPRD2
这种交换能在通用寄存器与累加器之间、通用寄存器之间、通用寄存器与存储器之间进行。
【重点】通用寄存器!AX、BX、CX、DX
3.3 地址传送指令
LEA OPRD1,OPRD2:OPRD1←OPRD2(EA)load effective address

3.4 堆栈指令
PUSH OPRDPOP OPRD
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-c6fj3pMq-1655777355985)(https://s3.bmp.ovh/imgs/2022/06/17/938922b6d72420ff.png#pic_center)]
8088:AH/AL→SP、8086:AX→SP。
# PUSH 汇编,但是是原子操作
DEC SP
MOV SP,AH
DEC SP
MOV SP,AL
# POP 汇编,但是是原子操作
MOV AL,SP
INC SP
MOV AH,SP
INC SP
8088系统堆栈是在存储器中开辟一个特定区域,SS:SP区域始终指向栈顶,反向生长。
即栈顶是低地址,然后PUSH的时候就会栈顶地址
--。
开辟堆栈的目的:
- 存放指令操作数(变量)。
- 保护断点和现场。
此处的现场指的是CPU现场吗?是进程的上下文吗?是PCB吗?
断点:说明是发生了中断。发生中断:执行异常处理程序之前,处理器会将返回时的指令地址,以及其他一些状态(通用寄存器,堆栈指针,程序状态字等等)压入内核栈。


4. CISC & RICS
CISC:
复杂指令集计算机的主要特点是:
- 指令系统复杂,指令数目多达 200~3000 条。
- 指令长度不固定,有更多的指令格式和更多的寻址方式。
- CPU 内部的通用寄存器比较少。
- 有更多的可以访问主存的指令。
- 指令种类繁多,但各种指令的使用频度差别很大。
- 不同的指令执行时间相差很大,一般都需要多个时钟周期才能完成。
- 控制器大多采用微程序控制器来实现。
- 难以用优化编译的方法获得高效率的目的代码。
RISC:
精减指令集计算机的主要特点:
- 只设置使用频度高的一些简单指令,复杂指令的功能由多条简单指令的组合来实现。
- 指令长度固定,指令种类少,寻址方式种类少。
- 访存指令很少,有的 RISC 只有 LDA(读内存)和 STA(写内存)两条指令。多数指令的操作在速度快的内部通用寄存器间进行。
- CPU 中设置大量的通用寄存器,一般有几十个甚至几百个。
- 控制器用硬件实现,采用组合逻辑控制器。
- 采用流水线技术,大多数指令 1 个时钟周期即可完成。
- 有利用优化编译程序。
- 可简化硬件设计,降低设计成本。

\\\\\\
(五)存储系统
存储系统是指计算机中存放程序和数据的各种存储设备、控制设备以及管理信息调度的设备(Hardware)和算法(Software)所组成的系统。提供:写入和读出计算机工作需要的信息(程序和数据)的能力,实现计算机的信息记忆功能。
寄存器→Cache→MM→外存

本章主要涉及主存储器MM和高速缓存Cahce。
主存储器:关于主存的构成,各种半导体存储器的基本原理,连接使用的问题(SRAM、DRAM、ROM)。
C a c h e Cache Cache: C a c h e Cache Cache的基本原理、映射方式、替换算法以及性能分析。
1. 存储器主要的性能指标
1.1 存储容量
芯片的容量: 1 K × 4 1K\times4 1K×4位。表示该芯片有1K个存储单元、每个存储单元的长度为4位。
系统的容量: 1 K B 1KB 1KB,表示该芯片是 1 K × 8 b i t ( 1 b y t e ) 1K\times8\ bit(1\ byte) 1K×8 bit(1 byte)。
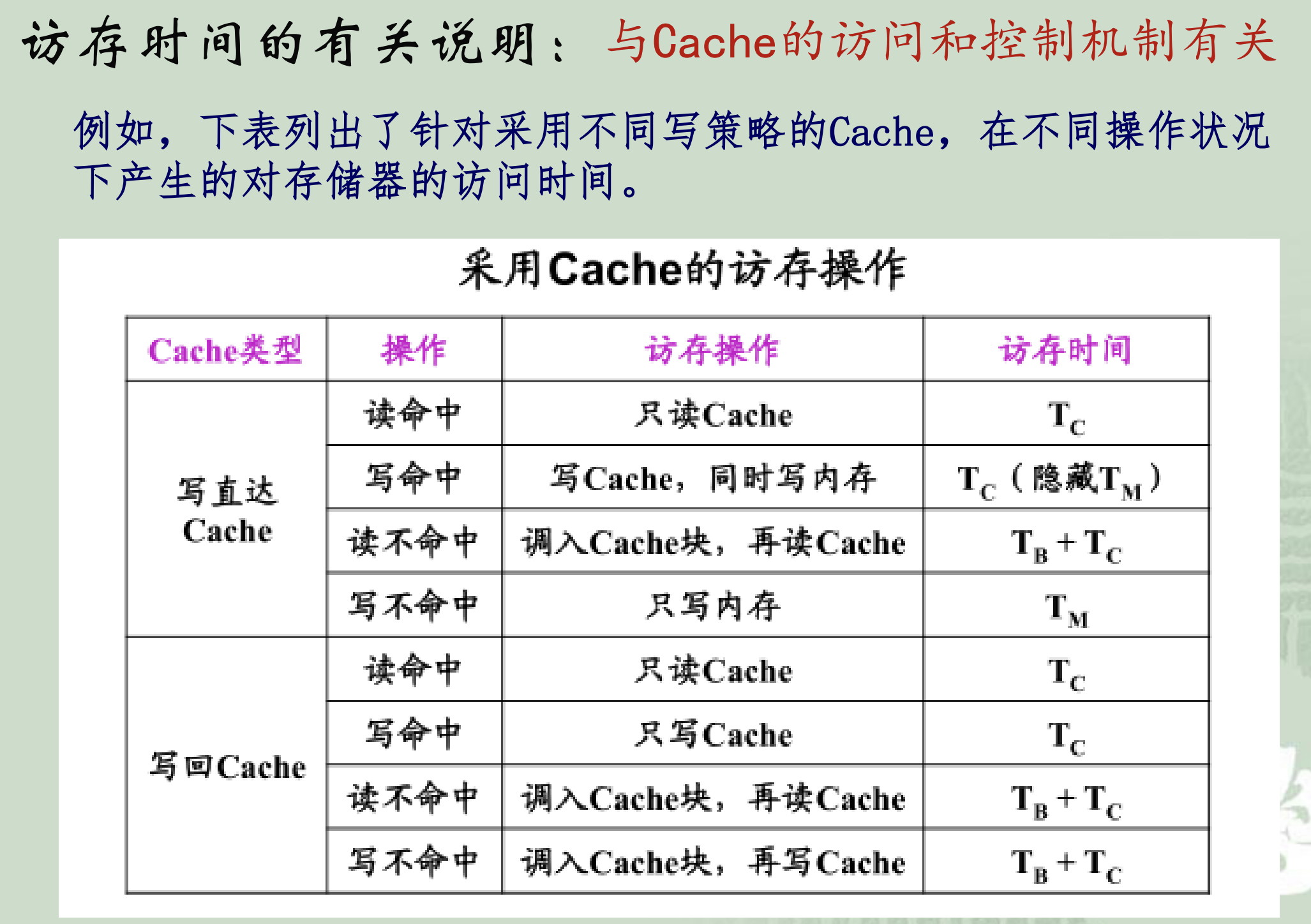
存储器速度: T m = T A + T 复 原 时 间 T_m=T_A+T_{复原时间} Tm=TA+T复原时间
T m T_m Tm:存取周期。
T A T_A TA:存取时间,包括译码时间和读出或写入时间。
T 复 原 时 间 T_{复原时间} T复原时间:读破坏类存储器的恢复时间。
可靠性:
M T B F MTBF MTBF:平均故障间隔时间( M T T F + M T T R MTTF+MTTR MTTF+MTTR)用于可维修部件的可靠性。
M T T F MTTF MTTF:平均无故障时间,用于不可维修部件的可靠性。
成本:
存储器的单位成本 c o s t cost cost: c = C S 元 位 c=\frac{C} S \frac{元}{位} c=SC位元
S:存储容量,C:整个存储器的价格
2. 主存储器

存储元:存储位、基本存储单元。用于存储1位二进制信息的电路。
存储单元:若干个存储元组成一个存储单元。许多个存储单元组成主存。
计算机的最小存储单元:字节单元。现代计算机按字节单元编址。
主存的地址空间由CPU地址线数决定。
2.1 RAM(随机读写存储器)
- SRAM(静态随机存储器)
- DRAM(动态随机存储器)
2.1.1 SRAM

数据一旦写入,其信息就稳定地保存在电路中并等待读出。只要不断电,此信息会一直保存下去。
功耗大、集成度低。
2.1.2 DRAM

2.1.3 SRAM与DRAM的对比

2.1.4 主存储器的组成和接口
- MAR:存储器地址寄存器,属于MM。
- MDR:存储器数据寄存器,属于MM。

此处的数据总线与8bit并没有关系,
存储器的速度要与CPU的速度相协调。CPU的读写内存的周期要 ≥ \ge ≥ 存储器芯片要求的读写时间。
2.1.4.1 内存构成

全地址译码:除了地址总线中参与低位地址线位,其余所有高位地址线全部参与片间地址译码的方法。它不会产生地址码重叠的存储区域,对于译码电路的要求hin高。
部分地址译码:线选与全译码结合。有的地址线未参加译码,会产生地址码重叠的存储区域。
2.1.4.2 存储器的扩展
字扩展:改变译码电路,把一些地址线用于参与片选。(适用于地址线多余的情况)
位扩展:适用于数据线位数多余芯片的存储单元的长度。
字位扩展:字扩展+位扩展
2.2 ROM(只读存储器)

2.3 其他存储器
2.3.1 双端口存储器
双端口存储器指的是:具有多组(两组)独立的读写端口,允许多个(两个)CPU或控制器从多个(两个)端口同时异步访问存储单元。多端口,时间并行,用于提高访存速度。

2.3.2 多体交叉存储器
用于提高访存速度、多模块在空间上并行。
2.3.3 相连存储器
依据内容决定 内容的地址or寻找与其相关的内容。
3. Cache
高速缓存器(Cache):在程序执行时,不需要从慢速的主存中存取指令和数据,而是直接访问这种高速小容量的存储器,从而可以提高CPU程序执行速度。
3.1 地址映射
- 全相联
- 直接映射
- 组项链映射

它的地址变换表,采用相联存储器。在TLB(Transition lookaside buffer)中,为每一个存储单元设置了:
- 有效位(1位):=1有效。
- 修改为(1位):当该块在使用中数据被修改时使用。
- 为替换方便,可以使用计数器(我猜是调度)
3.2 替换算法
显然就是OS中的Memory Management调度Page的算法啦。
- RAND:随机
- FIFO:先进先出
- LRU
- LFU
- OTP

3.3 Cache性能分析
Hit Rate(命中率): H = N c N c + N m H=\frac{N_c}{N_c+N_m} H=Nc+NmNc
N C N_C NC:Cache完成存取的总次数。
N m N_m Nm:主存完成存取的总次数。

概念嘛,说不准会考呢?

4. 比较Cache-主存&主存-辅存


(六)处理器设计
1. CPU的基本构成
- 控制器:控制部件
- 运算器:数据处理
- 通用寄存器组
- (Cache高速缓存、内部总线等)
运算器和控制器在冯·诺伊曼体系中是分开的两个组成部分,但是在现代计算机中合并到了一起。

这个要和上面那个8088的寄存器图结合看一下。就是控制器内部的寄存器和通用寄存器都有,就是没有段寄存器的DS、CS、SS、ES。
CPU内部只有一条总线,是单总线结构,那么对一条加法指令ADD R0,R1来说,使用到单总线、两个锁存器以及三个时钟周期。这三个时钟周期会三次分时使用总线。
2. 指令系统设计
2.1 指令分类

这一块的详细内容按指令系统这一章来看,重点是:对于一条指令的目的、存放、还有占用地址空间(是一地址指令还是二地址这样)。
基本过程:

放一个题:

3. 时序控制方式
同步控制:指令执行 or 指令中每个控制信号都由事先确定的统一的时序信号进行统一控制。
异步控制:当控制器发出某一控制操作信号,等待执行部件完成操作后发回“回答”信号,再开始新的操作。
(没有统一的时钟信号对信号进行同步,每条指令的指令周期可由多少不等的机器周期数组成)
联合控制:异步联合+同步控制。
(大部分微操作序列安排在固定的机器周期中,对某些时间难以确定的操作则采用“应答”方式)
4. 指令执行
取指译码取操作数指令执行
要会写它的流程,如下:

5. 微操作
- 微操作:控制信号控制执行的最基本操作(原子操作)。
- 微命令:实现微操作的控制信号,由控制器产生。
这个也是要会写,栗子如下:

5.1 微指令控制域编码
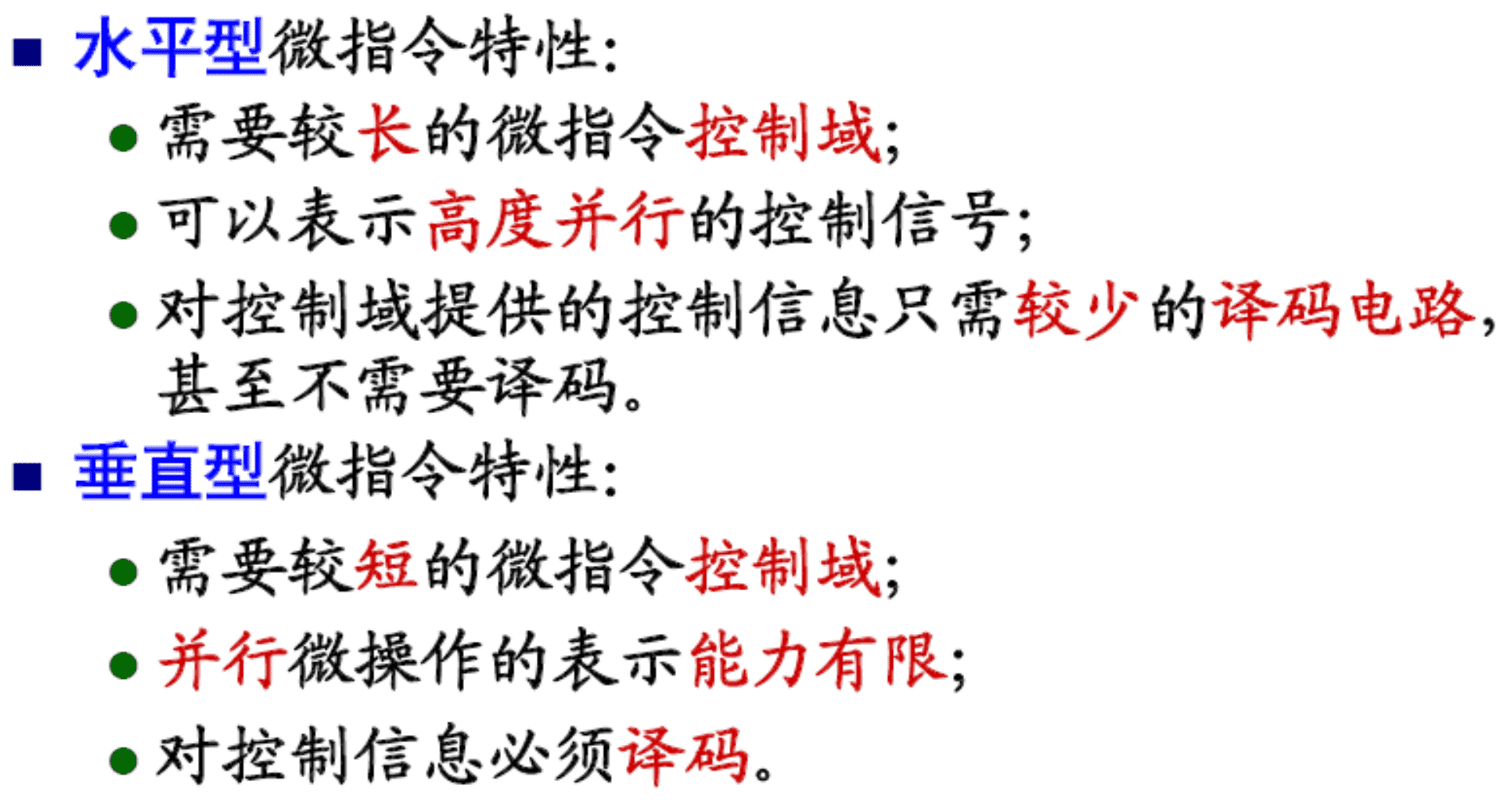
- 水平型微指令:多个控制信号同时有效,一条微指令定义和执行多个并行微指令。
- 垂直型微指令:**利用微操作码的不同编码来表示不同的微操作功能,**不强调微指令的并行能力,通常只能实现1-2个微命令。
5.1.1 字段译码法
将控制域分为若干字段,字段内垂直编码,字段间水平编码。互斥信号放在同一字段、相容信号放在不同字段。
- 相容信号:可以在同一个时间有效的控制信号。
- 互斥信号:不能再同一个时间有效的控制信号。
5.1.2 对水平型&垂直型的比较
边栏推荐
- 腾讯开源项目「应龙」成Apache顶级项目:前身长期服务微信支付,能hold住百万亿级数据流处理...
- 图片的可视化呈现有效增强大屏吸引力
- Nacos source code - Interface read configuration
- 5W1H talk about open source - what is open source?
- When the data security law comes, how can enterprises prepare for a rainy day? Tencent security has something to say
- 《opencv学习笔记》-- CV::Mat类
- Cook a delicious cli
- Tke deployment kubord
- Why use a firewall? What is the function of firewall?
- Concise tutorial | making cartoon heat map with PPT - EFP graph?!
猜你喜欢








随机推荐
"One good programmer is worth five ordinary programmers!"
2008R2 precautions for configuring L2TP pre shared key VPN
Clickhouse deployment and basic usage 1
集群控制管理
How to use data analysis tools to deal with emergencies in retail industry
Visual presentation of pictures effectively enhances the attraction of large screen
Google Earth engine (GEE) - how to add a legend in the map panel
How does wechat and QQ chat work? So simple!!!
PF_ Ring ZC | high speed traffic processing dpdk alternative
System design: key features of distributed systems
Maui的学习之路 -- 开篇
What are the means of network promotion?
It's so difficult for me. Have you met these interview questions?
Cause analysis of frequent crash and restart of easynvr-arm cloud terminal
Programmers spend most of their time not writing code, but...
Jenkins remote publishing products
Adobe Photoshop using the box selection tool for selection tutorial
Attribute observer didset and willset in swift of swiftui swift internal skill
SwiftUI Swift 内功之 Swift 中的属性观察者 didSet 与 willSet
脚本之美│VBS 入门交互实战