当前位置:网站首页>anchor free yolov1
anchor free yolov1
2022-07-23 12:55:00 【TJMtaotao】
1. YOLO的核心思想
YOLO的核心思想就是利用整张图作为网络的输入,直接在输出层回归bounding box的位置和bounding box所属的类别。
没记错的话faster RCNN中也直接用整张图作为输入,但是faster-RCNN整体还是采用了RCNN那种 proposal+classifier的思想,只不过是将提取proposal的步骤放在CNN中实现了。
2.YOLO的实现方法
- 将一幅图像分成SxS个网格(grid cell),如果某个object的中心 落在这个网格中,则这个网格就负责预测这个object。

每个网格要预测B个bounding box,每个bounding box除了要回归自身的位置之外,还要附带预测一个confidence值。
这个confidence代表了所预测的box中含有object的置信度和这个box预测的有多准两重信息,其值是这样计算的:
其中如果有object落在一个grid cell里,第一项取1,否则取0。 第二项是预测的bounding box和实际的groundtruth之间的IoU值。每个bounding box要预测(x, y, w, h)和confidence共5个值,每个网格还要预测一个类别信息,记为C类。则SxS个网格,每个网格要预测B个bounding box还要预测C个categories。输出就是S x S x (5*B+C)的一个tensor。
注意:class信息是针对每个网格的,confidence信息是针对每个bounding box的。举例说明: 在PASCAL VOC中,图像输入为448x448,取S=7,B=2,一共有20个类别(C=20)。则输出就是7x7x30的一个tensor。
整个网络结构如下图所示:

网络结构借鉴了 GoogLeNet 。24个卷积层,2个全链接层。(用1×1 reduction layers 紧跟 3×3 convolutional layers 取代Goolenet的 inception modules )

- 在test的时候,每个网格预测的class信息和bounding box预测的confidence信息相乘,就得到每个bounding box的class-specific confidence score:

等式左边第一项就是每个网格预测的类别信息,第二三项就是每个bounding box预测的confidence。这个乘积即encode了预测的box属于某一类的概率,也有该box准确度的信息。
- 得到每个box的class-specific confidence score以后,设置阈值,滤掉得分低的boxes,对保留的boxes进行NMS处理,就得到最终的检测结果。
3.YOLO的实现细节
每个grid有30维,这30维中,8维是回归box的坐标,2维是box的confidence,还有20维是类别。
其中坐标的x,y用对应网格的offset归一化到0-1之间,w,h用图像的width和height归一化到0-1之间。
在实现中,最主要的就是怎么设计损失函数,让这个三个方面得到很好的平衡。作者简单粗暴的全部采用了sum-squared error loss来做这件事。
这种做法存在以下几个问题:
第一,8维的localization error和20维的classification error同等重要显然是不合理的;
第二,如果一个网格中没有object(一幅图中这种网格很多),那么就会将这些网格中的box的confidence push到0,相比于较少的有object的网格,这种做法是overpowering的,这会导致网络不稳定甚至发散。
解决办法:- 更重视8维的坐标预测,给这些损失前面赋予更大的loss weight, 记为
 在pascal VOC训练中取5。
在pascal VOC训练中取5。 - 对没有object的box的confidence loss,赋予小的loss weight,记为
 在pascal VOC训练中取0.5。
在pascal VOC训练中取0.5。 - 有object的box的confidence loss和类别的loss的loss weight正常取1。
- 更重视8维的坐标预测,给这些损失前面赋予更大的loss weight, 记为
对不同大小的box预测中,相比于大box预测偏一点,小box预测偏一点肯定更不能被忍受的。而sum-square error loss中对同样的偏移loss是一样。
为了缓和这个问题,作者用了一个比较取巧的办法,就是将box的width和height取平方根代替原本的height和width。这个参考下面的图很容易理解,小box的横轴值较小,发生偏移时,反应到y轴上相比大box要大。一个网格预测多个box,希望的是每个box predictor专门负责预测某个object。具体做法就是看当前预测的box与ground truth box中哪个IoU大,就负责哪个。这种做法称作box predictor的specialization。
最后整个的损失函数如下所示:


这个损失函数中:
- 只有当某个网格中有object的时候才对classification error进行惩罚。
- 只有当某个box predictor对某个ground truth box负责的时候,才会对box的coordinate error进行惩罚,而对哪个ground truth box负责就看其预测值和ground truth box的IoU是不是在那个cell的所有box中最大。
- 其他细节,例如使用激活函数使用leak RELU,模型用ImageNet预训练等等

损失函数的设计目标就是让坐标(x,y,w,h),confidence,classification 这个三个方面达到很好的平衡。简单的全部采用了sum-squared error loss来做这件事会有以下不足: a) 8维的localization error和20维的classification error同等重要显然是不合理的; b) 如果一个网格中没有object(一幅图中这种网格很多),那么就会将这些网格中的box的confidence push到0,相比于较少的有object的网格,这种做法是overpowering的,这会导致网络不稳定甚至发散。 解决方案如下:
- 更重视8维的坐标预测,给这些损失前面赋予更大的loss weight, 记为
 rcoobj 在pascal VOC训练中取5。(上图蓝色框)
rcoobj 在pascal VOC训练中取5。(上图蓝色框) - 对没有object的bbox的confidence loss,赋予小的loss weight,记为 rnoobj在pascal VOC训练中取0.5。(上图橙色框)
- 有object的bbox的confidence loss (上图红色框) 和类别的loss (上图紫色框)的loss weight正常取1。
对不同大小的bbox预测中,相比于大bbox预测偏一点,小box预测偏一点更不能忍受。而sum-square error loss中对同样的偏移loss是一样。 为了缓和这个问题,作者用了一个比较取巧的办法,就是将box的width和height取平方根代替原本的height和width。 如下图:small bbox的横轴值较小,发生偏移时,反应到y轴上的loss(下图绿色)比big box(下图红色)要大。

一个网格预测多个bounding box,在训练时我们希望每个object(ground true box)只有一个bounding box专门负责(一个object 一个bbox)。具体做法是与ground true box(object)的IOU最大的bounding box 负责该ground true box(object)的预测。这种做法称作bounding box predictor的specialization(专职化)。每个预测器会对特定(sizes,aspect ratio or classed of object)的ground true box预测的越来越好。(个人理解:IOU最大者偏移会更少一些,可以更快速的学习到正确位置)
大致流程:
- Resize成448*448,图片分割得到7*7网格(cell)
- CNN提取特征和预测:卷积不忿负责提特征。全链接部分负责预测:a) 7*7*2=98个bounding box(bbox) 的坐标 和是否有物体的confidence 。 b) 7*7=49个cell所属20个物体的概率。
- 过滤bbox(通过nms)

训练:
预训练分类网络: 在 ImageNet 1000-class competition dataset上预训练一个分类网络,这个网络是Figure3中的前20个卷机网络+average-pooling layer+ fully connected layer (此时网络输入是224*224)。
训练检测网络:转换模型去执行检测任务,《Object detection networks on convolutional feature maps》提到说在预训练网络中增加卷积和全链接层可以改善性能。在他们例子基础上添加4个卷积层和2个全链接层,随机初始化权重。检测要求细粒度的视觉信息,所以把网络输入也又224*224变成448*448。见Figure3。
- 一幅图片分成7x7个网格(grid cell),某个物体的中心落在这个网格中此网格就负责预测这个物体。

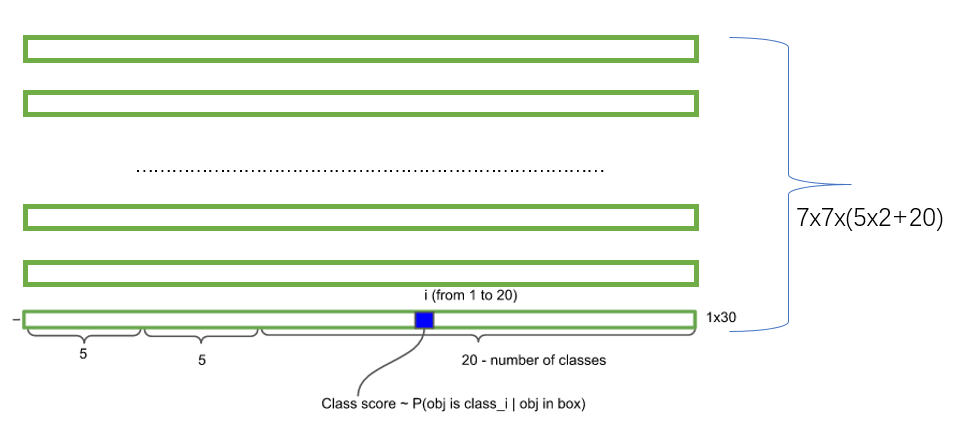
最后一层输出为 (7*7)*30的维度。每个 1*1*30的维度对应原图7*7个cell中的一个,1*1*30中含有类别预测和bbox坐标预测。总得来讲就是让网格负责类别信息,bounding box主要负责坐标信息(部分负责类别信息:confidence也算类别信息)。具体如下:
- 每个网格(1*1*30维度对应原图中的cell)要预测2个bounding box (图中黄色实线框)的坐标(,w,h) ,其中:中心坐标的 相对于对应的网格归一化到0-1之间,w,h用图像的width和height归一化到0-1之间。 每个bounding box除了要回归自身的位置之外,还要附带预测一个confidence值。 这个confidence代表了所预测的box中含有object的置信度和这个box预测的有多准两重信息:confidence = 。其中如果有ground true box(人工标记的物体)落在一个grid cell里,第一项取1,否则取0。 第二项是预测的bounding box和实际的ground truth box之间的IOU值。即:每个bounding box要预测 ,共5个值 ,2个bounding box共10个值,对应 1*1*30维度特征中的前10个。
-



- 每个网格还要预测类别信息,论文中有20类。7x7的网格,每个网格要预测2个 bounding box 和 20个类别概率,输出就是 7x7x(5x2 + 20) 。 (通用公式: SxS个网格,每个网格要预测B个bounding box还要预测C个categories,输出就是S x S x (5*B+C)的一个tensor。 注意:class信息是针对每个网格的,confidence信息是针对每个bounding box的)
4.YOLO的缺点
YOLO对相互靠的很近的物体,还有很小的群体 检测效果不好,这是因为一个网格中只预测了两个框,并且只属于一类。
对测试图像中,同一类物体出现的新的不常见的长宽比和其他情况是。泛化能力偏弱。
由于损失函数的问题,定位误差是影响检测效果的主要原因。尤其是大小物体的处理上,还有待加强。
https://blog.csdn.net/c20081052/article/details/80236015
边栏推荐
猜你喜欢
UiPath Studio Enterprise 22.4 Crack

移动端H5 - 手撸一个生命线 timeline

中国化NFT?NFR横空出世
Fastadmin, non super administrator, has been granted batch update permission, but it still shows no permission

阿里平头哥CPU技术生态负责人陈炜:平头哥的发展之路

Ali Er Mian: when does MySQL use table locks and row locks?

智慧民航新业态崭露头角,图扑数字孪生入局民航飞联网

20220721 beaten content

Esp8266 nodemcu flash file system (spiffs)

The working principle of PLL. For example, how can our 8MHz crystal oscillator make MCU work at 48mhz or 72mhz
随机推荐
Cloudcompare & PCL normal vector space sampling (NSS)
Niuke-top101-bm35
Go interface: go deep into internal principles
千万别让富坚义博看到这个
Circuit structure and output mode of GPIO port of 32-bit single chip microcomputer
CNCF基金会总经理Priyanka Sharma:一文读懂CNCF运作机制
动态规划背包问题之01背包详解
封片剂 甘油封片 中性树脂封片剂型
怎么购买收益在6%以上的理财产品?
Une solution complète au problème du sac à dos dans la programmation dynamique
16 automated test interview questions and answers
三方支付公司有哪些?
Transparent proxy server architecture of squid proxy service
牛客-TOP101-BM35
(已解决)idea编译Gradle项目提示 错误找不到符号
知道为什么PCBA电路板会板翘吗?
[C language] structure, enumeration and union
pytest接口自动化测试框架 | pytest常用运行参数
Purpose of wsastartup function
Flutter | firstWhere 报错问题