当前位置:网站首页>三维点云课程(六)——三维目标检测
三维点云课程(六)——三维目标检测
2022-07-23 17:44:00 【桦树无泪】
1. 图像目标检测
长方体表示:长宽高、中心点、朝向、类别
![]()
思路:先检测后分类
 1.1 评价检测好坏
1.1 评价检测好坏

Precision:检测对的概率 Recall:检测到的概率 两者很难兼得
- AP(Average Precision) mAP(Mean over all categories)

- NMS
每一个选择器后面都有一个NMS,选择一个最好的检测框
选择置信度最大的框,再计算其他框与该框的重叠范围IOU,如果大于一定阈值就舍去。

1.2 物体检测的方法

1.2.1 Two-Stage
先定位后检测
- RCNN :本质是一个聚类成框,再对框进行分类。需要对每个框进行分类很慢

- Fast RCNN
 先对图像提取特征,再ROI Pooling缩放成统一大小,再经过MLP。分类神经网络是工作在Feature map上的。
先对图像提取特征,再ROI Pooling缩放成统一大小,再经过MLP。分类神经网络是工作在Feature map上的。
ROI Pooling具体过程如下,不管框原先大小是什么,最后都缩放成7*7。


 ROI Pooling 有精度损失,提出了ROI Align线性插值
ROI Pooling 有精度损失,提出了ROI Align线性插值

- Faster RCNN
框是深度学习给的

- Mask RCNN 实例分割

1.2.2 One-Stage
把背景看成一个类,每个地方出3个anchor box ,对每一个进行分类,计算位置。没有了先判断框内是否有物体。


2. 点云目标检测
投影视角
三维网格
投影
2.1 VoxelNet
三维卷积pointnet++


有许多方格内是没有点的,不需要传入神经网络 ,加速方法如下


- Data Augmentation
1、对整体点云旋转,但不能旋转太多
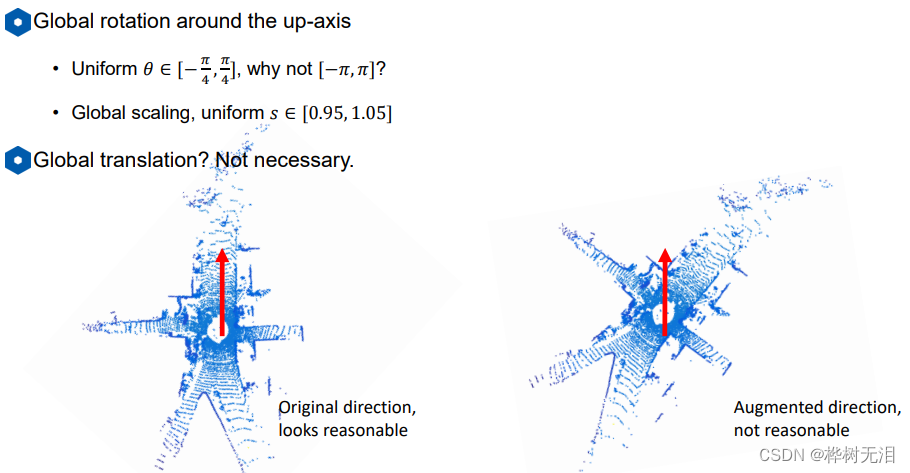
2、 对目标进行平移旋转,也不能太多
 2.2 PointPillars
2.2 PointPillars
 空间一堆柱子,每一个柱子压缩成一个平面
空间一堆柱子,每一个柱子压缩成一个平面

- Focal Loss
解决类别不均衡问题,正常情况比较少的类别会被忽略,该方法将注意力转到小的类别上。


2.3 Point-wise operation
2.3.1 PointRCNN
- 得到每个点的feature vector
- 把前景背景分割,每一个前景做一个proposal
- 每一个box做ROI Pooling
所有操作都是以点的形式输入


2.4 Vison Fusion
2.4.1 Frustum PointNet
将图像上的框投影到点云,视觉与LIDAR在时间空间上很难对齐。
 2.4.2 PointPainting
2.4.2 PointPainting

边栏推荐
- Emgucv common function function description "suggestions collection"
- lendingclub贷款状态loan status业务详解-current,charge off,issued,Fully Paid,grace period
- .NET Core 实现后台任务(定时任务)Longbow.Tasks 组件(三)
- DP problem collection
- Brief introduction of Perl language
- MEE | 浙大程磊组开发设计与构建合成菌群新方法
- 总结一些最近见到的 TRICK
- ZigBee integrated development environment IAR installation
- .Net CLR R2R编译的原理简析
- R语言data.table包进行数据分组聚合统计变换(Aggregating transforms)、计算dataframe数据的分组最小值(min)
猜你喜欢
.NET Core 实现后台任务(定时任务)Longbow.Tasks 组件(三)
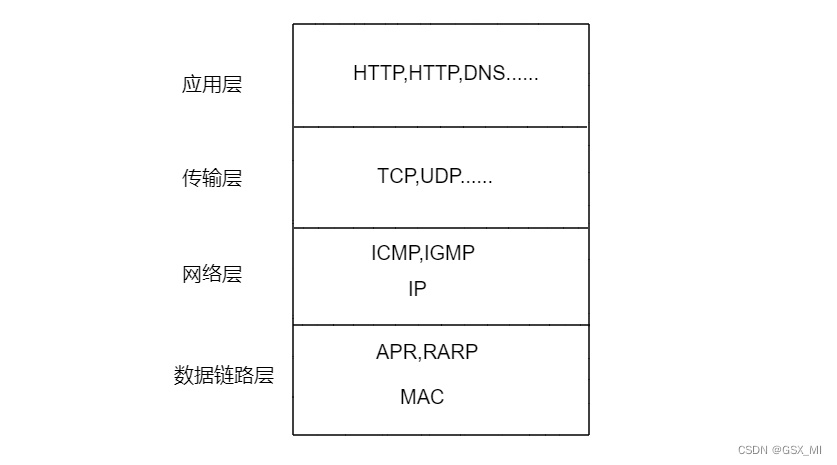
数据链路层 -------- 以太网 和 ARP

Digital security giant entrust revealed that it was attacked by blackmail software gangs in June
![[shutter -- layout] flexible layout (flex and expanded)](/img/03/0f07a56487f8e91045f9e893e9f96c.png)
[shutter -- layout] flexible layout (flex and expanded)

看完这篇,彻底搞懂 gRPC!

Little fish sends lidar | just dinner is the first lottery
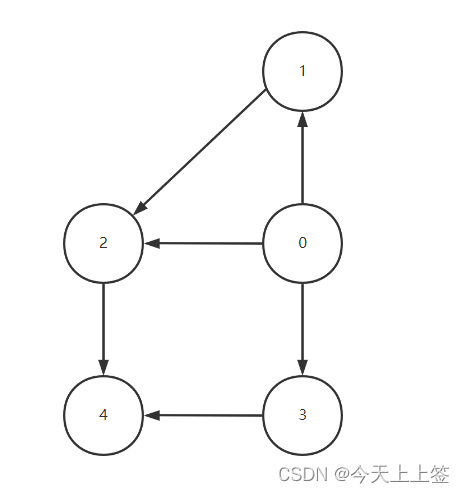
有向图之求两点之间所有路径

Implementation of IIC protocol with FPGA (I) IIC bus protocol

ACM MM 2022 Oral | DIG: 自监督文字识别的新框架,刷新11个公开场景文字数据集的识别性能,平均提升5%...

USB3.0:VL817Q7-C0的LAYOUT指南

随机推荐
Terminal终端命令(全)
R语言检验样本是否符合正态性(检验样本是否来自一个正态分布总体):使用nortest包的sf.test函数检验样本是否符合正态分布(normality test)
AE 教程,如何在 After Effects 中对 Illustrator 分图层文档进行动画绘制?
Mee | Zhejiang University Chenglei group develops a new method for designing and constructing synthetic flora
H7-TOOL的I2C接口方式脱机烧录操作方法,已经发布(2022-07-16)
【C语言】程序环境和预处理
[machine learning] Wu Enda: lifelong learning
What is the difference between preamplifier and power amplifier?
R语言使用tidyr包的gather函数将从宽表转化为长表(宽表转化为长表)、第一个参数指定原多个数据列名称生成的新数据列名称、第二个参数指定原表内容值、第三个和第四个参数指定不变的列名称列表
What is stack and the difference between stacks
H7-TOOL串口脱机烧录操作说明,支持TTL串口,RS232和RS485(2022-06-30)
.net core implements background tasks (scheduled tasks) longbow Tasks component (III)
FPGA flash reading and writing based on SPI
R语言使用quantile函数计算向量数据或者dataframe指定数据列的分位数(百分位数)
C # startup program loses double quotation marks for parameters passed. How to solve it?
.NET Core 实现后台任务(定时任务)Longbow.Tasks 组件(三)
canvas绘制文本和清除绘制
Fragment
J9数字论:数字行业的FOMO现象我们应该怎么克服?
Fragment