当前位置:网站首页>粒子滤波 PF——在机动目标跟踪中的应用(粒子滤波VS扩展卡尔曼滤波)
粒子滤波 PF——在机动目标跟踪中的应用(粒子滤波VS扩展卡尔曼滤波)
2022-06-26 15:06:00 【脑壳二】
粒子滤波 PF——在机动目标跟踪中的应用(粒子滤波VS扩展卡尔曼滤波)
对于该博客跟踪代码以及问题探讨可以联系:WX:ZB823618313
对于其他跟踪定位问题的代码及探讨也可以联系
粒子滤波 PF——在目标跟踪中的应用
原创不易,路过的各位大佬请点个赞
一、问题描述(离散时间非线性系统描述)
考虑一般非线性系统模型,
x k = f ( x k − 1 , w k − 1 ) z k = h ( x k , v k ) (1) x_k=f(x_{k-1},w_{k-1}) \\ z_k=h(x_k,v_k ) \tag{1} xk=f(xk−1,wk−1)zk=h(xk,vk)(1)
其中 x k x_k xk为 k k k时刻的目标状态向量。 z k z_k zk为 k k k时刻量测向量(传感器数据)。这里不考虑控制器 u k u_k uk。 w k {w_k} wk和 v k {v_k} vk分别是过程噪声序列和量测噪声序列,并假设 w k w_k wk和 v k v_k vk为零均值高斯白噪声,其方差分别为 Q k Q_k Qk和 R k R_k Rk的高斯白噪声,即 w k ∼ ( 0 , Q k ) w_k\sim(0,Q_k) wk∼(0,Qk), v k ∼ ( 0 , R k ) v_k\sim(0,R_k) vk∼(0,Rk),且满足如下关系(线性高斯假设)为:
E [ w i v j ′ ] = 0 E [ w i w j ′ ] = 0 i ≠ j E [ v i v j ′ ] = 0 i ≠ j \begin{aligned} E[w_iv_j'] &=0\\ E[w_iw_j'] &=0\quad i\neq j \\ E[v_iv_j'] &=0\quad i\neq j \end{aligned} E[wivj′]E[wiwj′]E[vivj′]=0=0i=j=0i=j
二、粒子滤波 PF
核心思想:是使用一组具有相应权值的随机样本(粒子)来表示状态的后验分布。该方法的基本思路是选取一个重要性概率密度并从中进行随机抽样,得到一些带有相应权值的随机样本后,在状态观测的基础上调节权值的大小。和粒子的位置,再使用这些样本来逼近状态后验分布,最后将这组样本的加权求和作为状态的估计值。粒子滤波不受系统模型的线性和高斯假设约束,采用样本形式而不是函数形式对状态概率密度进行描述,使其不需要对状态变量的概率分布进行过多的约束,因而在非线性非高斯动态系统中广泛应用。尽管如此,粒子滤波目前仍存在计算量过大、粒子退化等关键问题亟待突破。
通常情况下选择先验分布作为重要性密度函数、即
q ( x k ∣ x k − 1 ( i ) , z k ) = p ( x k ∣ x k − 1 ( i ) ) q(x_k |x_{k-1}^{(i)}, z_{k})=p(x_k |x_{k-1}^{(i)}) q(xk∣xk−1(i),zk)=p(xk∣xk−1(i))
对该函数取重要性权值为
w k ( i ) = w k − 1 ( i ) p ( z k ∣ x k ( i ) ) w_k^{(i)}=w_{k-1}^{(i)}p(z_k |x_{k}^{(i)}) wk(i)=wk−1(i)p(zk∣xk(i))
同样 w k ( i ) w_k^{(i)} wk(i)需要归一化得到 w ~ k ( i ) \tilde{w}_k^{(i)} w~k(i)。
标准的粒子滤波算法步骤为:
粒子滤波PF:
Step 1: 根据 p ( x 0 ) p(x_{0}) p(x0)采样得到 N N N个粒子 x 0 ( i ) ∼ p ( x 0 ) x_0^{(i)} \sim p(x_{0}) x0(i)∼p(x0)
For i = 2 : N i=2:N i=2:N
Step 2: 根据状态转移函数产生新的粒子为:$ x k ( i ) ∼ p ( x k ∣ x k − 1 ( i ) ) x_k^{(i)} \sim p(x_{k} |x_{k-1}^{(i)}) xk(i)∼p(xk∣xk−1(i))
Step 3: 计算重要性权值: w k ( i ) = w k − 1 ( i ) p ( z k ∣ x k ( i ) ) w_k^{(i)}=w_{k-1}^{(i)}p(z_k |x_{k}^{(i)}) wk(i)=wk−1(i)p(zk∣xk(i))
Step 4: 归一化重要性权值: w ~ k ( i ) = w k ( i ) ∑ j = 1 N w k ( j ) \tilde{w}_k^{(i)}=\frac{w_k^{(i)}}{\sum_{j=1}^Nw_k^{(j)}} w~k(i)=∑j=1Nwk(j)wk(i)
Step 5: 使用重采样方法对粒子进行重采样(以系统重采样为例)
Step 6: 得到 k k k时刻的后验状态估计:
E [ x ^ k ] = ∑ i = 1 N x k ( i ) w ~ k ( i ) E[\hat{x}_{k}]= \sum_{i=1}^Nx_{k}^{(i)}\tilde{w}_k^{(i)} E[x^k]=i=1∑Nxk(i)w~k(i)
End For
粒子滤波PF算法结构图

算法:系统重采样 (systematic resampling)
For i = 1 : N i=1:N i=1:N
Step 1: 初始化累积概率密度函数CDF: c 1 = 0 c_1=0 c1=0
For i = 2 : N i=2:N i=2:N
Step 2: 构造CDF: c i = c i − 1 + w k ( i ) c_i=c_{i-1}+w_k^{(i)} ci=ci−1+wk(i)
Step 3: 从CDF的底部开始: i = 1 i=1 i=1
Step 4: 采样起始点: u 1 = U [ 0 , 1 / N ] u_1=\mathcal{U}[0,1/N] u1=U[0,1/N]
End For
For j = 1 : N j=1:N j=1:N
Step 5: 沿CDF移动: u j = u 1 + ( j − 1 ) / N u_j=u_{1}+(j-1)/N uj=u1+(j−1)/N
Step 6: While u j > c i u_j>c_i uj>ci
i = i + 1 i=i+1 i=i+1
End While
Step 7: 赋值粒子: x k ( j ) = x k ( i ) x_k^{(j)}=x_k^{(i)} xk(j)=xk(i)
Step 8: 赋值权值: w k ( j ) = 1 / N w_k^{(j)}=1/N wk(j)=1/N
Step 9: 赋值父代: i ( j ) = i i^{(j)}=i i(j)=i
End For
三、仿真场景:三维雷达目标跟踪
3.1 仿真场景(三维螺旋上升机动目标)
目标模型
考虑一各三维的匀速转弯运动目标:
x k + 1 = F k x k + G k w k x_{k+1}=F_kx_k+G _kw_k xk+1=Fkxk+Gkwk
其中状态向量 x k = [ x k , x ˙ k , y k , y ˙ k , z k , z ˙ k ] ′ x_k=[x_k,\dot{x}_k,y_k,\dot{y}_k,z_k,\dot{z}_k]' xk=[xk,x˙k,yk,y˙k,zk,z˙k]′;噪声为 w k = [ w x , w y , w z ] ′ w_k=[w_x,w_y,w_z]' wk=[wx,wy,wz]′;
目标运动轨迹为三维匀速转弯运动模型
运动轨迹:螺旋上升
如果为非线性目标,则将状态转移矩阵 F k F_k Fk代替为雅可比矩阵即可。为了不是一般性这里采用线性模型进行仿真。主要处理目标跟踪,雷达量测存在的非线性滤波问题。
雷达量测模型
在三维情况下,雷达量测为距离和角度
r k m = r k + r ~ k b k m = b k + b ~ k e k m = e k + e ~ k {r}_k^m=r_k+\tilde{r}_k\\ b^m_k=b_k+\tilde{b}_k\\ e^m_k=e_k+\tilde{e}_k rkm=rk+r~kbkm=bk+b~kekm=ek+e~k
其中
r k = ( x k − x 0 ) + ( y k − y 0 ) 2 ) b k = tan − 1 y k − y 0 x k − x 0 e k = tan − 1 z k − z 0 ( x k − x 0 ) 2 + ( y k − y 0 ) 2 r_k=\sqrt{(x_k-x_0)^+(y_k-y_0)^2)}\\ b_k=\tan^{-1}{\frac{y_k-y_0}{x_k-x_0}}\\ e_k=\tan^{-1}{\frac{z_k-z_0}{\sqrt{(x_k-x_0)^2+(y_k-y_0)^2}}}\\ rk=(xk−x0)+(yk−y0)2)bk=tan−1xk−x0yk−y0ek=tan−1(xk−x0)2+(yk−y0)2zk−z0
[ x 0 , y 0 , z 0 ] [x_0,y_0,z_0] [x0,y0,z0]为雷达坐标,一般情况为0。雷达量测为 z k = [ r k , b k , e k ] ′ z_k=[r_k,b_k,e_k]' zk=[rk,bk,ek]′。雷达量测方差为
R k = cov ( v k ) = [ σ r 2 0 0 0 σ b 2 0 0 0 σ e 2 ] R_k=\text{cov}(v_k)=\begin{bmatrix}\sigma_r^2 & 0 &0\\0 & \sigma_b^2 &0\\0&0& \sigma_e^2 \end{bmatrix} Rk=cov(vk)=⎣⎡σr2000σb2000σe2⎦⎤且 σ r = 20 m \sigma_r=20m σr=20m, σ b = 20 m r a d \sigma_b=20mrad σb=20mrad, σ e = 15 m r a d \sigma_e=15mrad σe=15mrad。
性能指标
RMSE(Root mean-squared error):蒙塔卡罗次数 M = 500 M=500 M=500, x ^ k ∣ k i \hat{x}_{k|k}^i x^k∣ki为第 i i i次仿真得到的估计。
RMSE ( x ^ ) = 1 M ∑ i = 1 M ( x k − x ^ k ∣ k i ) ( x k − x ^ k ∣ k i ) ′ \text{RMSE}(\hat{x})=\sqrt{\frac{1}{M}\sum_{i=1}^{M}(\mathbf{x}_k-\hat{\mathbf{x}}_{k|k}^i)(\mathbf{x}_k-\hat{\mathbf{x}}_{k|k}^i)'} RMSE(x^)=M1i=1∑M(xk−x^k∣ki)(xk−x^k∣ki)′
Position RMSE ( x ^ ) = 1 M ∑ i = 1 M ( x k − x ^ k ∣ k i ) 2 + ( y k − y ^ k ∣ k i ) 2 + ( z k − z ^ k ∣ k i ) 2 \text{Position RMSE}(\hat{x})=\sqrt{\frac{1}{M}\sum_{i=1}^{M}(x_k-\hat{x}_{k|k}^i)^2+(y_k-\hat{y}_{k|k}^i)^2+(z_k-\hat{z}_{k|k}^i)^2} Position RMSE(x^)=M1i=1∑M(xk−x^k∣ki)2+(yk−y^k∣ki)2+(zk−z^k∣ki)2
Velocity RMSE ( x ^ ) = 1 M ∑ i = 1 M ( x ˙ k − x ˙ ^ k ∣ k i ) 2 + ( y ˙ k − y ˙ ^ k ∣ k i ) 2 + ( z ˙ k − z ˙ ^ k ∣ k i ) 2 \text{Velocity RMSE}(\hat{x})=\sqrt{\frac{1}{M}\sum_{i=1}^{M}(\dot{x}_k-\hat{\dot{x}}_{k|k}^i)^2+(\dot{y}_k-\hat{\dot{y}}_{k|k}^i)^2+(\dot{z}_k-\hat{\dot{z}}_{k|k}^i)^2} Velocity RMSE(x^)=M1i=1∑M(x˙k−x˙^k∣ki)2+(y˙k−y˙^k∣ki)2+(z˙k−z˙^k∣ki)2
ANEES(average normalized estimation error square), n n n 为状态维数, P k ∣ k i \mathbf{P}_{k|k}^i Pk∣ki为第 i i i次仿真滤波器输出的估计协方差
ANEES ( x ^ ) = 1 M n ∑ i = 1 M ( x k − x ^ k ∣ k i ) ′ ( P k ∣ k i ) − 1 ( x k − x ^ k ∣ k i ) \text{ANEES}(\hat{x})=\frac{1}{Mn}\sum_{i=1}^{M}(\mathbf{x}_k-\hat{\mathbf{x}}_{k|k}^i)'(\mathbf{P}_{k|k}^i)^{-1} (\mathbf{x}_k-\hat{\mathbf{x}}_{k|k}^i) ANEES(x^)=Mn1i=1∑M(xk−x^k∣ki)′(Pk∣ki)−1(xk−x^k∣ki)
3.2 跟踪轨迹
三维跟踪轨迹:
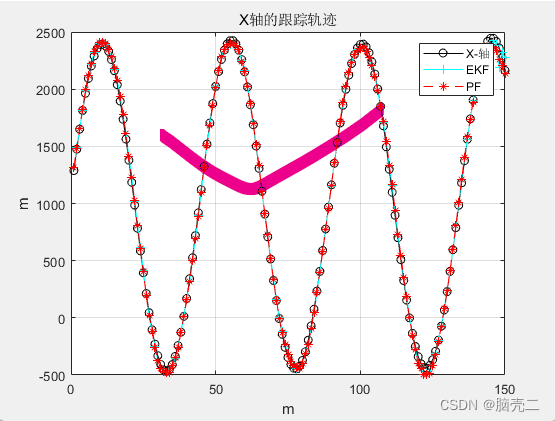


3.3 跟踪误差


四、部分代码
对于该博客跟踪代码以及问题探讨可以联系:WX:ZB823618313
对于其他跟踪定位问题的代码及探讨也可以联系
代码:系统重采样 (systematic resampling)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 系统重采样子函数
% 输入参数:weight为原始数据对应的权重大小
% 输出参数:outIndex是根据weight筛选和复制结果
function outIndex = systematicR(weight);
N=length(weight);
N_children=zeros(1,N);
label=zeros(1,N);
label=1:1:N;
s=1/N;
auxw=0;
auxl=0;
li=0;
T=s*rand(1);
j=1;
Q=0;
i=0;
u=rand(1,N);
while (T<1)
if (Q>T)
T=T+s;
N_children(1,li)=N_children(1,li)+1;
else
i=fix((N-j+1)*u(1,j))+j;
auxw=weight(1,i);
li=label(1,i);
Q=Q+auxw;
weight(1,i)=weight(1,j);
label(1,i)=label(1,j);
j=j+1;
end
end
index=1;
for i=1:N
if (N_children(1,i)>0)
for j=index:index+N_children(1,i)-1
outIndex(j) = i;
end;
end;
index= index+N_children(1,i);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
边栏推荐
- [tcapulusdb knowledge base] tcapulusdb system user group introduction
- 一键分析硬件/IO/全国网络性能脚本(强推)
- 券商经理给的开户二维码安全吗?找谁可以开户啊?
- 夏令营来啦!!!冲冲冲
- 整理了一批脚本标准的函数模块(2021版)
- Talk about the RPA direction planning: stick to simple and valuable things for a long time
- Principle of TCP reset attack
- 乐鑫 AWS IoT ExpressLink 模组达到通用可用性
- Unity C # e-learning (VIII) -- www
- 一键安装gcc脚本
猜你喜欢

RestCloud ETL抽取动态库表数据实践
![[tcapulusdb knowledge base] tcapulusdb doc acceptance - create business introduction](/img/05/8ec56393cac534cb5a00c10a1a9f32.png)
[tcapulusdb knowledge base] tcapulusdb doc acceptance - create business introduction

【ceph】mkdir|mksnap流程源码分析|锁状态切换实例

小程序:uniapp解决 vendor.js 体积过大的问题
![[tcapulusdb knowledge base] tcapulusdb doc acceptance - Introduction to creating game area](/img/7b/8c4f1549054ee8c0184495d9e8e378.png)
[tcapulusdb knowledge base] tcapulusdb doc acceptance - Introduction to creating game area

Minister of investment of Indonesia: Hon Hai is considering establishing electric bus system and urban Internet of things in its new capital

RestCloud ETL解决shell脚本参数化
Analysis of ble packet capturing debugging information

【C语言练习——打印空心上三角及其变形】

Program analysis and Optimization - 8 register allocation
随机推荐
Unity C # e-learning (VIII) -- www
Redis transaction and watch instruction
[CEPH] cephfs internal implementation (II): example -- undigested
The R language cartools package divides data, the scale function scales data, and the KNN function of the class package constructs a k-nearest neighbor classifier
【ceph】cephfs caps简介
Restcloud ETL extracting dynamic library table data
The tablestack function of the epidisplay package of R language makes a statistical summary table (descriptive statistics of groups, hypothesis test, etc.), does not set the by parameter to calculate
Applicable and inapplicable scenarios of mongodb series
通过券商经理的开户链接开股票账户安全吗?还是去证券公司开户安全?
Redis cluster re fragmentation and ask command
[tcapulusdb knowledge base] tcapulusdb doc acceptance - table creation approval introduction
Get the intersection union difference set of two dataframes
TCP congestion control details | 1 summary
Restcloud ETL extraction de données de table de base de données dynamique
HR export data Excel VBA
【TcaplusDB知识库】TcaplusDB运维单据介绍
vsomeip3 双机通信文件配置
【小程序实战系列】小程序框架 页面注册 生命周期 介绍
TS common data types summary
RestCloud ETL抽取动态库表数据实践