当前位置:网站首页>Application of motion capture in automatic control field
Application of motion capture in automatic control field
2022-07-24 03:22:00 【MocapLeader】
In recent years , All walks of life have gradually carried out research on automation equipment , Among them, the development of unmanned aerial vehicle technology and robot technology is particularly rapid , Many universities and scientific research institutions are conducting research on a variety of application scenarios around these two directions .
UAV field
In the field of UAV , The common research direction is multi UAV formation technology , This is called in scientific research “ Multi agent collaborative control ”, Researchers need to locate the UAV , Get its location in space , This position information is mainly six degrees of freedom attitude data , Then establish the communication between multi-agent , Finally, through the control decision system , According to the spatial location of each agent , Complete collaborative control . Through this technology , It can be applied to many fields , Such as military “ swarm ” Combat system , Power grid 、 Unmanned aerial vehicle inspection of pipeline , UAV formation performance in the cultural and entertainment industry , Intelligent construction of unmanned aerial vehicles in the construction industry .

Locate the space position of the UAV , It is the most important part in the research of multi-agent cooperative control , Only get accurate and stable positioning information , In order to control the UAV well . As a traditional method of positioning , Inertial measurement unit (IMU) And inertial navigation module (INS) There is a serious gyro zero drift , Resulting in acquired orientation 、 Posture 、 The accuracy of data such as speed is not high , There is error accumulation , It's hard to work independently for a long time . Optical motion capture system relies on high precision 、 High real time 、 It can simulate the characteristics of the scene in the laboratory environment , It is gradually favored by researchers , The school of automation of Beijing University of technology uses NOKOV Metric optical 3D motion capture system , Obtain the pose information of UAV with sub millimeter accuracy , Combine the communication network and control decision-making system between multiple UAVs, that is, multiple agents , A set of networked multi-agent air ground cooperative control experimental platform has been explored , You can send instructions remotely through the control end , Let the drone 、 Unmanned vehicles carry out designated formation cooperation .
Robot field
Based on the same positioning principle , Robot research is also blossoming in many fields . Applied to industrial manufacturing lines 、 Mechanical arm of logistics warehousing scene , By capturing its modular manipulator and dexterous hand , Get its attitude data , Carry out corresponding control planning ; It can be used in earthquake relief 、 Multi legged robots used in military scenes , Through the joint angle of its foot 、 Capture of speed information , Optimize its movement mode in different environments ; And the disabled 、 Special soldiers are equipped with exoskeleton robots , With the help of optical motion capture system, kinematic gait information such as joint angle is obtained , Optimize the exoskeleton structure , So as to better assist the wearer in many aspects , Rehabilitation robots also use the same principle 、 Humanoid robot, etc .

besides , There are also many kinds of robot research in progress , Such as the College of mechanical and electrical engineering and automation in Shenzhen Campus of Harbin Institute of Technology , The application of optical motion capture system to flapping wing robot “ trunk ”、“ Wing ” Do location analysis , Optimize its flight attitude ; In the same laboratory , Another research group captures the precise movements of human hands through optical motion capture system , Build a humanoid mobile phone device human , It is intended to improve the efficiency of assembly of small parts on the assembly line , The user has sent two articles based on the experiment EI The paper , It proves the effectiveness of the experiment .
Read more about :
Distributed collaborative control of multi-agent system _6DOF location _ Manipulator positioning motion planning _ Measurement technology NOKOV Measurement can realize high-precision real-time indoor positioning and motion tracking , Collect kinematics data such as six degrees of freedom pose data and joint angle . The obtained data can be obtained through VRPN transmission , Or through SDK(C++ Language ) Port broadcast and ROS、Labview、Matlab( contain Simulink) Wait for software communication for secondary development  https://www.nokov.com/motion-capture-Robotics-uav-engineering.html Classic case | NOKOV Measure motion capture Classic case https://www.nokov.com/support/case_studies.html#case-list-1
https://www.nokov.com/motion-capture-Robotics-uav-engineering.html Classic case | NOKOV Measure motion capture Classic case https://www.nokov.com/support/case_studies.html#case-list-1
边栏推荐
- JMeter interview script
- IO流分类整理
- [interpolation expression of applet, rendering judgment, binding events and sharing]
- Android Development - lambda expression of kotlin syntax
- 错误代码0x80004005
- Android开发——Kotlin语法之Lambda表达式
- idea写web项目时报错Failed to load resource: the server responded with a status of 404 (Not Found)
- Cache component status when Vue components are switched, that is, dynamic components keep alive dynamic components and asynchronous components
- C language implementation of user login program
- Realize the communication before two pages (using localstorage)
猜你喜欢
Bingbing learning notes: basic operation of vim tool

实现两个页面之前的通信(使用localStorage)

JS small game running bear and cat source code

How does the small program mall refine the operation of members?

JS Array isaarray () Type of

Web3 traffic aggregation platform starfish OS gives players a new paradigm experience of metauniverse
QT custom class uses custom parametric signals and slots
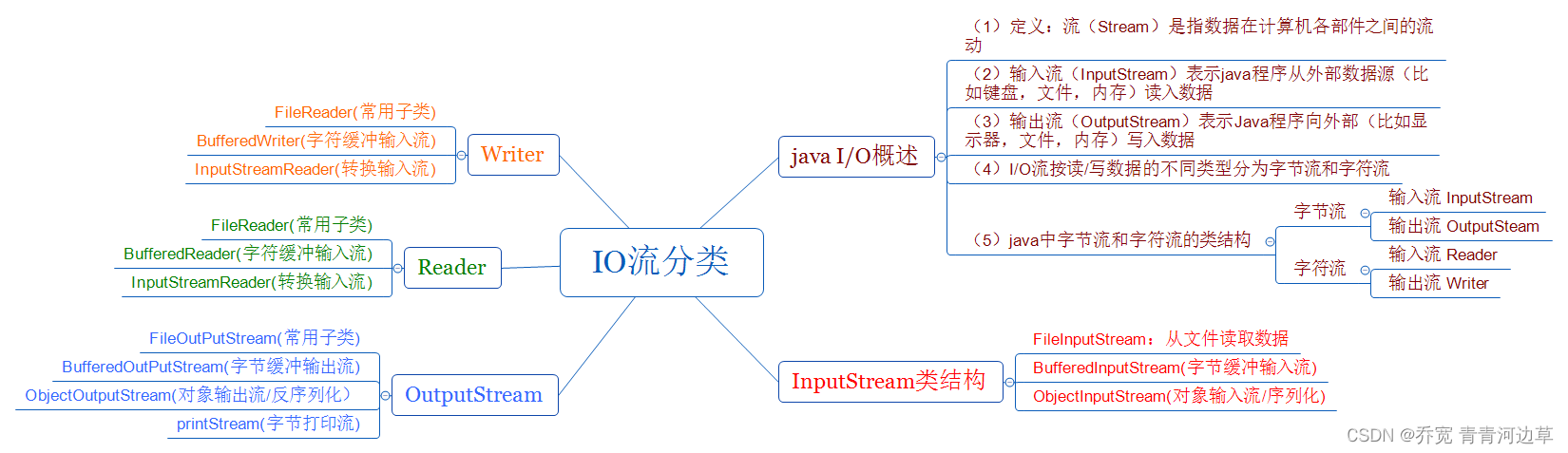
IO流分类整理

Programmers may still be programmers, and coders may only be coders

C file operation details
随机推荐
Outlook client outlook.com mailbox setting method
Example of producer consumer code implemented by the destructor framework without lock
Water topic: connect rainwater
Hcip day 10 (initial BGP border gateway protocol)
Redux Usage Summary
Acwing 4498. pointer (DFS)
Binary search
C自定义类型详解
C. Minimum Ties-Educational Codeforces Round 104 (Rated for Div. 2)
Do you know how to do interface testing well?
Data Lake: comparative analysis of open source data Lake schemes deltalake, Hudi and iceberg
uva1445
Exttestngireporterlistener all codes
Data Lake: introduction to Apache Hudi
微信公众号在线客服接入发方法和功能详解
What is the security of Treasury reverse repo
OSPF routing control
MySql的DDL和DML和DQL的基本语法
String.split()最详细源码解读及注意事项
数据湖:开源数据湖方案DeltaLake、Hudi、Iceberg对比分析