当前位置:网站首页>论文回顾:Unmixing-Based Soft Color Segmentation for Image Manipulation
论文回顾:Unmixing-Based Soft Color Segmentation for Image Manipulation
2022-06-26 02:39:00 【Researcher-Du】
Unmixing-Based Soft Color Segmentation for Image Manipulation 是一篇基于软分割的图像处理论文,发表于SIGGRAPH 2017。全文19页,总体来讲,比较难懂,文中写了很多看似无关的内容,比如Matting,迭代优化等。我参考了论文实现才对文章有了清楚的把握。
参考代码:https://github.com/liuguoyou/color-unmixing
B站video:https://www.bilibili.com/video/BV1bU4y1x7MY/?vd_source=6a91312d89cec082cf6d5a92fee7279a
按照惯例,先上一张teaser。对于输入图像(a),该算法自动提取多个layer(b),每个layer所在的region几乎不相交(在不同region边界会有一定相交,所谓的软分割),并且每个layer的颜色服从一个正太分布, 提取图层后,就可以对图像进行颜色调整,如(c-d)所示。
简单回顾一下经典的基于调色板的图层提取算法。这类算法(Chang et al, 聚类算法; Tan et al,几何凸包):
1)首先提取输入图像的几种代表性颜色作为图像的调色板: C = { C 1 , C 2 . . . C k } C = \{C_1,C_2...C_k\} C={ C1,C2...Ck}.
2)接下来对图像中的像素进行插值,将每个像素表示成调色板的凸组合: c p = ∑ i w i p C i c_p = \sum_iw^p_iC_i cp=∑iwipCi, 且满足 ∑ i w i p = 1 \sum_iw^p_i=1 ∑iwip=1.
3)自然的每一个图层就可以表示为: L i p = w i p C i L^p_i = w^p_iC_i Lip=wipCi, 其中, L i p L^p_i Lip表示图层 L i L_i Li中 p p p点的颜色。
Recoloring:根据 2),我们只需计算一次插值权重,然后修改调色板颜色即可实现重着色: c p ′ = ∑ i w i p C i ′ c'_p = \sum_iw^p_iC'_i cp′=∑iwipCi′.
基于调色板的算法的主要缺点是很难保持插值的稀疏性。通俗地讲,比如2)中,可能 p p p 关于所有调色板颜色的插值权重 w 1 p w^p_1 w1p 均大于0,如此一来,当你改变一个调色板的颜色时可能使得图像全局的颜色发生变化,使得重着色操作的局部性不够好。因此插值稀疏性是一个重要的问题,稀疏的插值才能实现局部性良好的图像重着色。我想今天要讲的这篇论文从一定程度上实现了较好的稀疏性,因为大多数像素只关联到一个图层而非多个,只在region边界的像素才关联到多个图层(类似于matting算法的效果)。
回到正题,简单讲讲这篇论文的算法。
一、颜色表示
算法将提取多个图层,每个图层的颜色符合正太分布。类似于基于调色板的图层分解算法,任意图层 L i L_i Li 包含 颜色 和 不透明度信息。图层中像素 p p p 的颜色和不透明度分别表示为: u i p u^p_i uip 和 α i p \alpha^p_i αip. 因此,图像中任意像素点的颜色可由多个图层混合而成:
c p = ∑ i α i p u i p (1) c^p = \sum_i\alpha^p_iu^p_i\tag1 cp=i∑αipuip(1)
需要满足的条件1:保证凸组合,权重之和为1: ∑ i α i p = 1 (2) \sum_i\alpha^p_i=1\tag2 i∑αip=1(2).
需要满足的条件2:颜色和不透明度的值域位于0,1之间: α i p , u i p ∈ [ 0 , 1 ] (3) \alpha_{i}^{p}, {u}_{i}^{p} \in[0,1]\tag3 αip,uip∈[0,1](3).
接下来介绍,首先介绍如何得到图层及其参数。
二、图层分解
之前提到本文提取的每个layer的颜色服从正太分布。因此,首先要确定有几个layer以及估计每个layer的正态分布。针对初始layer估计,文章采用了一种迭代的方式通过投票的方式自动决定layer的数目并进一步估计layer的参数。
1)首先将输入图像在RGB空间均分为 10 × 10 × 10 = 1000 10\times10\times10=1000 10×10×10=1000 个bins。
2)然后计算图像的梯度,可以直接调用Opencv的库函数 cv2.Laplacian求得所有像素点的梯度。
3)遍历所有像素点,针对每一个像素点 p p p, 定位到所在的 bin 假设其坐标为 b = { b r , b g , b b } b=\{b_r,b_g,b_b\} b={ br,bg,bb},计算该像素点的投票权重:
v p = e − ∥ ∇ c p ∥ ( 1 − e − r p ) (4) v^{p}=e^{-\left\|\nabla c^{p}\right\|}\left(1-e^{-r^{p}}\right)\tag4 vp=e−∥∇cp∥(1−e−rp)(4)
其中, ∇ c p \nabla c^{p} ∇cp 表示 p p p 的梯度, r p r^{p} rp 论文中称为 representation score,可以认为是 p p p 的重建误差, 稍后会在第二部分讲述如何计算这个重建误差。 从式子可以看出:
a) 重建误差 r p r^{p} rp 越大, e − r p e^{-r^{p}} e−rp 越接近0, 从而 ( 1 − e − r p ) \left(1-e^{-r^{p}}\right) (1−e−rp) 越大,导致 v p v^{p} vp 越大。
b) 梯度 ∇ c p \nabla c^{p} ∇cp 越小即该点颜色跟周围颜色差异越小, e − ∥ ∇ c p ∥ e^{-\left\|\nabla c^{p}\right\|} e−∥∇cp∥ 越大。
接下来,将该点的投票权重累积到所在的bin: b i n s [ b r ] [ b g ] [ b b ] + = v p bins[b_r][b_g][b_b] += v^p bins[br][bg][bb]+=vp.
4)选出投票权重最大的bin: b i n m a x = m a x ( b i n [ 0 ] [ 0 ] [ 0 ] , b i n [ 0 ] [ 0 ] [ [ 1 ] , . . . b i n [ 9 ] [ 9 ] [ 9 ] ) bin_{max} = max(bin[0][0][0],bin[0][0][[1],...bin[9][9][9]) binmax=max(bin[0][0][0],bin[0][0][[1],...bin[9][9][9])
5)在 b i n m a x bin_{max} binmax 中选出种子点。遍历 b i n m a x bin_{max} binmax 中的所有像素点, 针对任一像素点 p p p, 统计其 20 × 20 20 \times 20 20×20 的邻域中有多少个像素点也落在 b i n m a x bin_{max} binmax 中,记为 S p S^p Sp。 最后,再次计算 p p p 点的得分:
s c o r e p = S p e − ∥ ∇ c p ∥ (5) score_p =S^pe^{-\left\|\nabla c^{p}\right\|} \tag5 scorep=Spe−∥∇cp∥(5)
选出 b i n m a x bin_{max} binmax 中得分最高的像素点作为种子点:
s i = arg max p ∈ bin S p s c o r e p (6) s_{i}=\underset{p \in \text { bin }}{\arg \max } \mathcal{S}^{p} score_p\tag6 si=p∈ bin argmaxSpscorep(6)
6)对种子点 s i s_i si 所在的 20 × 20 20 \times 20 20×20 邻域进行类似高斯滤波的操作, 计算邻域每个像素的滤波权重,并让权重归一化。
7)对种子点 s i s_i si 所在的 20 × 20 20 \times 20 20×20 邻域, 估计正太分布参数:均值和协方差矩阵。这样我们就得到了第一个layer对应的正态分布。
8)重复1)~ 7),循环停止条件:如果绝大多数(99.5%)像素的重建误差都已经很小: r p < τ 2 r^p < \tau^2 rp<τ2, ( τ = 5 \tau=5 τ=5),则算法停止。
上一张论文中迭代选取种子点的过程图,图中的人就是论文作者本人!
三、Representation Score
输入: n n n 个layer对应的正太分布。
输出:计算每个像素点的representation score。
针对每个像素点 p p p, 其representation score 通过最小化如下能量函数求得:
F S = ∑ i α i p D i ( u i p ) + σ ( ∑ i α i p ∑ i ( α i p ) 2 − 1 ) (7) \mathcal{F}_{\mathcal{S}}=\sum_{i} \alpha^p_{i} \mathcal{D}_{i}\left(u^p_i\right)+\sigma\left(\frac{\sum_{i} \alpha^p_{i}}{\sum_{i} {(\alpha^p_{i}})^{2}}-1\right)\tag7 FS=i∑αipDi(uip)+σ(∑i(αip)2∑iαip−1)(7)
该能量函数包括两项:
1)第一项 : ∑ i α i p D i ( u i p ) \sum_{i} \alpha^p_{i} \mathcal{D}_{i}\left(u^p_i\right) ∑iαipDi(uip), 其中 D i {D}_{i} Di 表示图层 L i L_i Li 对应的正太分布, D i ( u i p ) \mathcal{D}_{i}\left(u^p_i\right) Di(uip) 表示待求的颜色 u i p u^p_i uip 到 该正太分布的 Mahalanobis distance(马氏距离), α i p \alpha^p_i αip 表示待求的不透明度。这一项主要的目的是求出的图层在 p p p 点的颜色尽可能服从估计的正太分布,乘以系数 α i p \alpha^p_i αip 在于对这些距离加权, α i p \alpha^p_i αip 越大的那些图层更加重要,要尽量服从这些图层的正太分布,因为 p p p 点的颜色,主要由这些不透明度较大图层决定。
2)第二项: σ ( ∑ i α i p ∑ i ( α i p ) 2 − 1 ) \sigma\left(\frac{\sum_{i} \alpha^p_{i}}{\sum_{i} {(\alpha^p_{i}})^{2}}-1\right) σ(∑i(αip)2∑iαip−1) 是一个稀疏性约束, σ \sigma σ是一个系数,一般设定为10. 从这个式子可以看出来,当 p p p点关于多个图层的不透明度集合 α p = { α 1 p , α 2 p , α 3 p , . . . α k p } \alpha^p = \{\alpha^p_{1},\alpha^p_{2},\alpha^p_{3},...\alpha^p_{k}\} αp={ α1p,α2p,α3p,...αkp}, 如果只有一个不透明度为1,其余全为0时,将取得最小值1,从而使得公式(7)的第2项的值为0. 这就使得优化后的不透明度集合稀疏(少量的值>0),如文章开头所说,这样保证了图像编辑良好的局部性。
初始化:考察 p p p点在输入图像中的颜色,计算最匹配的图层(马氏距离最小),假设为 L j L_j Lj, 那么分别初始化颜色和不透明度:
u p = { 0 , 0 , 0 , . . . u j p = 1 , . . . 0 } , α p = { 0 , 0 , 0 , . . . α j p = 1 , . . . 0 } (8) u^p = \{0,0,0,...u^p_j=1,...0\}, \alpha^p = \{0,0,0,...\alpha^p_j=1,...0\}\tag8 up={ 0,0,0,...ujp=1,...0},αp={ 0,0,0,...αjp=1,...0}(8)
注意能量最小化的时候,同时需要考虑公式(1)所示的重建误差,公式(2)所示的凸组合约束,公式(3)所示的值域约束条件。
四、 结果比较及总结
最后上一张图层分解结果对比。可以看到,本文提取的图层稀疏性较好,比如图像中的橙子(左边第1行第4列)被非常好的提取出来,而Tan的方法提取的橙子位于;两个图层(右侧第1行第2列,右侧第2行第1列)。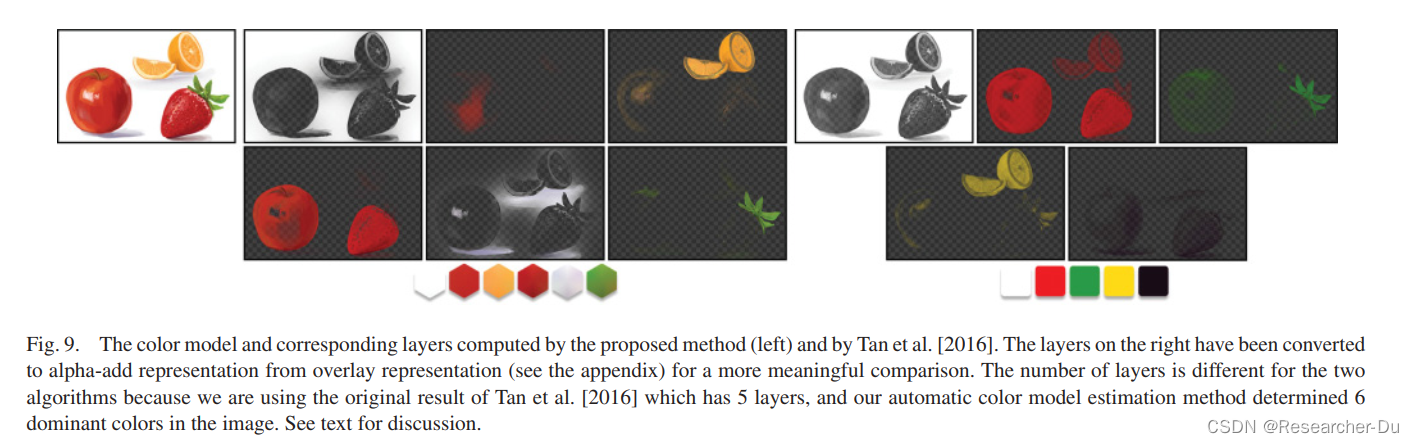
简单总结:
1)方法较为新颖,跟一般调色板分解算法不同,假设每个图层服从正太分布;
2)算法计算复杂度较高,需要多次迭代,需要最优化求解像素的representation sore;
3)重着色比一般基于调色板的图层分解算法复杂,因为本文图层并不是单色,需要导出到PS中进一步重着色,比较麻烦。
4)个人认为,论文写得不好,读起来比较费劲,不好理解。
边栏推荐
- 附加:HikariCP连接池简述;(并没有深究,只是对HikariCP连接池有个基本认识)
- R language survival analysis
- Teach you to quickly record sounds on PC web pages as audio files
- Learn from Taiji makers - mqtt (V) publish, subscribe and unsubscribe
- js array数组json去重
- Clion项目中运行多个main函数
- 限制输入字符长度length英文1个字符中文2个字符
- Can the main RF circuit be removed for projects that do not need the main RF?
- P2483-[模板]k短路/[SDOI2010]魔法猪学院【主席树,堆】
- 学习太极创客 — MQTT(四)服务端连接操作
猜你喜欢
![[machine learning] case study of college entrance examination prediction based on multiple time series](/img/13/7368a169d07e01d86a2d2c0207ccca.png)
[machine learning] case study of college entrance examination prediction based on multiple time series

How to prompt

【解决】联想拯救者vmware启动虚拟机蓝屏重启问题

网络PXE启动WinPE,支持UEFI和LEGACY引导

财富自由技能:把自己产品化
Utonmos adheres to the principle of "collection and copyright" to help the high-quality development of traditional culture

UE5全局光照系統Lumen解析與優化

Google recommends using kotlin flow in MVVM architecture

数据库查询语句SQL中like、%、-的区别

Camtasia 2022全新版超清录制电脑视频
随机推荐
[solution] the blue screen restart problem of the virtual machine started by the VMware of Lenovo Savior
What can Arthas do for you?
Components and routing
How to delete gridlines in ggplot2 (with examples)
力扣(LeetCode)175. 组合两个表(2022.06.24)
UTONMOS坚持“藏品、版权”双优原则助力传统文化高质量发展
喜讯 | 祝贺Apache Linkis(incubating) 社区新增5位Committer
Dual batteries in series, hardware design
【flask入门系列】flask处理请求和处理响应
Good news | congratulations on the addition of 5 new committers in Apache linkage (incubating) community
力扣(LeetCode)176. 第二高的薪水(2022.06.25)
[system architecture] - how to evaluate software architecture
[QT] custom control - switch
Arduino string to hexadecimal number for large color serial port screen.
Literature reading --- optimize RNA SEQ research to study herbicide resistance (review)
Utonmos adheres to the principle of "collection and copyright" to help the high-quality development of traditional culture
【论文笔记】Manufacturing Control in Job Shop Environments with Reinforcement Learning
A few simple ways for programmers to exercise their waist
Notes on the 3rd harmonyos training in the studio
scrapy返回400