当前位置:网站首页>Single or multiple human posture estimation using openpose
Single or multiple human posture estimation using openpose
2022-07-25 15:10:00 【weixin_ forty-two million seven hundred and nine thousand five 】
In computer vision , Human posture estimation ( Key point detection ) It's a very common problem , In physical fitness 、 Action acquisition 、3D Fitting 、 Public opinion monitoring and other fields have broad application prospects , The detection method to be used in this paper is based on OpenPose Human posture estimation method based on .
One 、OpenPose brief introduction
OpenPose The human posture recognition project is Carnegie Mellon University (CMU) Based on Convolutional Neural Networks (CNN) And supervised learning (SL) And Caffe Open source library developed for the framework . It can realize human movement 、 Facial expressions 、 Finger movements, etc . Suitable for single or multiple people , It has very good robustness , It is the first real-time multi person two-dimensional attitude estimation application based on deep learning in the world .
Two 、 Realization principle
OpenPose The Internet VGGNet Before 10 Layer is used to create feature mapping for the input image , Then these features are input into two parallel branches of the convolution layer . The first branch predicts a set of confidence graphs (18 individual ), Each confidence graph represents a specific part of the human posture skeleton graph , The second branch predicts another set Part Affinity Field (PAF,38 individual ),PAF Indicates the degree of association between components . The picture below shows OpenPose Network model architecture diagram and flow chart of detection example image .

3、 ... and 、OpenPose Implementation code
import cv2
import time
import numpy as np
from random import randint
image1 = cv2.imread("znl112.jpg")# Add... According to your own path
protoFile = "pose_deploy_linevec.prototxt"
weightsFile = "pose_iter_440000.caffemodel"
nPoints = 18
# COCO Output Format
keypointsMapping = ['Nose', 'Neck', 'R-Sho', 'R-Elb', 'R-Wr', 'L-Sho', 'L-Elb', 'L-Wr', 'R-Hip',
'R-Knee', 'R-Ank', 'L-Hip', 'L-Knee', 'L-Ank', 'R-Eye', 'L-Eye', 'R-Ear', 'L-Ear']
POSE_PAIRS = [[1,2],[1,5],[2,3],[3,4],[5,6],[6,7],
[1,8],[8,9],[9,10],[1,11],[11,12],[12,13],
[1,0],[0,14],[14,16],[0,15],[15,17],[2,17],[5,16]]
# index of pafs correspoding to the POSE_PAIRS
# e.g for POSE_PAIR(1,2), the PAFs are located at indices (31,32) of output, Similarly, (1,5) -> (39,40) and so on.
mapIdx = [[31,32], [39,40], [33,34], [35,36], [41,42], [43,44],
[19,20], [21,22], [23,24], [25,26], [27,28], [29,30],
[47,48], [49,50], [53,54], [51,52], [55,56], [37,38], [45,46]]
colors = [[0,100,255], [0,100,255], [0,255,255], [0,100,255], [0,255,255], [0,100,255],
[0,255,0], [255,200,100], [255,0,255], [0,255,0], [255,200,100], [255,0,255],
[0,0,255], [255,0,0], [200,200,0], [255,0,0], [200,200,0], [0,0,0]]
def getKeypoints(probMap, threshold=0.1):
mapSmooth = cv2.GaussianBlur(probMap,(3,3),0,0)
mapMask = np.uint8(mapSmooth>threshold)
keypoints = []
#find the blobs
_, contours, _ = cv2.findContours(mapMask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
#for each blob find the maxima
for cnt in contours:
blobMask = np.zeros(mapMask.shape)
blobMask = cv2.fillConvexPoly(blobMask, cnt, 1)
maskedProbMap = mapSmooth * blobMask
_, maxVal, _, maxLoc = cv2.minMaxLoc(maskedProbMap)
keypoints.append(maxLoc + (probMap[maxLoc[1], maxLoc[0]],))
return keypoints
# Find valid connections between the different joints of a all persons present
def getValidPairs(output):
valid_pairs = []
invalid_pairs = []
n_interp_samples = 10
paf_score_th = 0.1
conf_th = 0.7
# loop for every POSE_PAIR
for k in range(len(mapIdx)):
# A->B constitute a limb
pafA = output[0, mapIdx[k][0], :, :]
pafB = output[0, mapIdx[k][1], :, :]
pafA = cv2.resize(pafA,(frameWidth, frameHeight))
pafB = cv2.resize(pafB,(frameWidth, frameHeight))
# Find the keypoints for the first and second limb
candA = detected_keypoints[POSE_PAIRS[k][0]]
candB = detected_keypoints[POSE_PAIRS[k][1]]
nA = len(candA)
nB = len(candB)
# If keypoints for the joint-pair is detected
# check every joint in candA with every joint in candB
# Calculate the distance vector between the two joints
# Find the PAF values at a set of interpolated points between the joints
# Use the above formula to compute a score to mark the connection valid
if(nA != 0 and nB != 0):
valid_pair = np.zeros((0,3))
for i in range(nA):
max_j=-1
maxScore = -1
found = 0
for j in range(nB):
# Find d_ij
d_ij = np.subtract(candB[j][:2], candA[i][:2])
norm = np.linalg.norm(d_ij)
if norm:
d_ij = d_ij / norm
else:
continue
# Find p(u)
interp_coord = list(zip(np.linspace(candA[i][0], candB[j][0], num=n_interp_samples),
np.linspace(candA[i][1], candB[j][1], num=n_interp_samples)))
# Find L(p(u))
paf_interp = []
for k in range(len(interp_coord)):
paf_interp.append([pafA[int(round(interp_coord[k][1])), int(round(interp_coord[k][0]))],
pafB[int(round(interp_coord[k][1])), int(round(interp_coord[k][0]))] ])
# Find E
paf_scores = np.dot(paf_interp, d_ij)
avg_paf_score = sum(paf_scores)/len(paf_scores)
# Check if the connection is valid
# If the fraction of interpolated vectors aligned with PAF is higher then threshold -> Valid Pair
if(len(np.where(paf_scores>paf_score_th)[0])/n_interp_samples)>conf_th:
if avg_paf_score > maxScore:
max_j = j
maxScore = avg_paf_score
found = 1
# Append the connection to the list
if found:
valid_pair = np.append(valid_pair, [[candA[i][3], candB[max_j][3], maxScore]], axis=0)
# Append the detected connections to the global list
valid_pairs.append(valid_pair)
else: # If no keypoints are detected
#print("No Connection : k = {}".format(k))
invalid_pairs.append(k)
valid_pairs.append([])
return valid_pairs, invalid_pairs
# This function creates a list of keypoints belonging to each person
# For each detected valid pair, it assigns the joint(s) to a person
def getPersonwiseKeypoints(valid_pairs, invalid_pairs):
# the last number in each row is the overall score
personwiseKeypoints = -1 * np.ones((0, 19))
for k in range(len(mapIdx)):
if k not in invalid_pairs:
partAs = valid_pairs[k][:,0]
partBs = valid_pairs[k][:,1]
indexA, indexB = np.array(POSE_PAIRS[k])
for i in range(len(valid_pairs[k])):
found = 0
person_idx = -1
for j in range(len(personwiseKeypoints)):
if personwiseKeypoints[j][indexA] == partAs[i]:
person_idx = j
found = 1
break
if found:
personwiseKeypoints[person_idx][indexB] = partBs[i]
personwiseKeypoints[person_idx][-1] += keypoints_list[partBs[i].astype(int),2]+valid_pairs[k][i][2]
# if find no partA in the subset, create a new subset
elif not found and k < 17:
row = -1 * np.ones(19)
row[indexA] = partAs[i]
row[indexB] = partBs[i]
# add the keypoint_scores for the two keypoints and the paf_score
row[-1] = sum(keypoints_list[valid_pairs[k][i,:2].astype(int),2])+valid_pairs[k][i][2]
personwiseKeypoints = np.vstack([personwiseKeypoints,row])
return personwiseKeypoints
frameWidth = image1.shape[1]
frameHeight = image1.shape[0]
t = time.time()
net = cv2.dnn.readNetFromCaffe(protoFile, weightsFile)
# Fix the input Height and get the width according to the Aspect Ratio
inHeight = 368
inWidth = int((inHeight/frameHeight)*frameWidth)
inpBlob = cv2.dnn.blobFromImage(image1,1.0/255,(inWidth,inHeight),(0,0,0),swapRB=False,crop=False)
net.setInput(inpBlob)
output = net.forward()
print("Time Taken in forward pass = {}".format(time.time() - t))
detected_keypoints = []
keypoints_list = np.zeros((0,3))
keypoint_id = 0
threshold = 0.1
for part in range(nPoints):
probMap = output[0,part,:,:]
probMap = cv2.resize(probMap, (image1.shape[1], image1.shape[0]))
keypoints = getKeypoints(probMap, threshold)
#print("Keypoints - {} : {}".format(keypointsMapping[part], keypoints))
if keypointsMapping[part]=='Nose':
print(len(keypoints))
keypoints_with_id = []
for i in range(len(keypoints)):
keypoints_with_id.append(keypoints[i] + (keypoint_id,))
keypoints_list = np.vstack([keypoints_list, keypoints[i]])
keypoint_id += 1
detected_keypoints.append(keypoints_with_id)
#print(len(keypoints))
frameClone = image1.copy()
for i in range(nPoints):
for j in range(len(detected_keypoints[i])):
cv2.circle(frameClone, detected_keypoints[i][j][0:2], 5, colors[i], -1, cv2.LINE_AA)
#cv2.imshow("Keypoints",frameClone)
valid_pairs, invalid_pairs = getValidPairs(output)
personwiseKeypoints = getPersonwiseKeypoints(valid_pairs, invalid_pairs)
for i in range(17):
for n in range(len(personwiseKeypoints)):
index = personwiseKeypoints[n][np.array(POSE_PAIRS[i])]
if -1 in index:
continue
B = np.int32(keypoints_list[index.astype(int), 0])
A = np.int32(keypoints_list[index.astype(int), 1])
cv2.line(frameClone, (B[0], A[0]), (B[1], A[1]), colors[i], 3, cv2.LINE_AA)
cv2.imshow("Detected Pose",frameClone)
cv2.waitKey(0)
Find a single test picture , The test results are as follows :
If you want to show the number of people detected in the running results , You can choose one or several key points in the human body as the basis for judgment , Readers can adjust according to their own situation , In this paper, the detection of human nose is used (Nose) As the basis for judging the number of people , Its running time and the number of people detected are as follows :
Find three different pictures containing multiple characters to test , The number of people detected are 2,2,5, The running results are as follows :
picture 1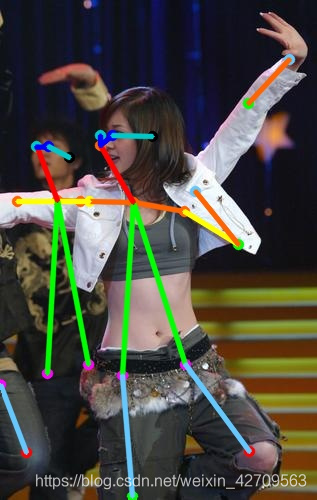

picture 2

picture 3

That's all of the article , If this article helps you , You can give me a compliment , Add a focus on , thank you !
边栏推荐
- 一个程序最多可以使用多少内存?
- 什么是物联网
- Reprint ---- how to read the code?
- Promise对象与宏任务、微任务
- Spark002 --- spark task submission, pass JSON as a parameter
- 给VS2010自动设置模板,加头注释
- Meanshift clustering-01 principle analysis
- 打开虚拟机时出现VMware Workstation 未能启动 VMware Authorization Service
- I2C device driver hierarchy
- Install entityframework method
猜你喜欢

图片裁剪cropper 示例

oracle_ 12505 error resolution

6月产品升级观察站

Visual Studio 2022 查看类关系图

32 chrome调试工具的使用

用setTimeout模拟setInterval定时器

IP address classification, which determines whether a network segment is a subnet supernetwork

一个程序最多可以使用多少内存?

"Ask every day" how locksupport realizes thread waiting and wakeup
![[Nacos] what does nacosclient do during service registration](/img/76/3c2e8f9ba19e36d9581f34fda65923.png)
[Nacos] what does nacosclient do during service registration
随机推荐
sql to linq 之存储过程偏
32 chrome调试工具的使用
Scala111-map、flatten、flatMap
oracle_12505错误解决方法
ice 100G 网卡分片报文 hash 问题
bridge-nf-call-ip6tables is an unknown key异常处理
Login of MySQL [database system]
Client error: invalid param endpoint is blank
防抖(debounce)和节流(throttle)
【JS高级】js之正则相关函数以及正则对象_02
pkg_ Resources dynamic loading plug-in
C#,C/S升级更新
LeetCode_因式分解_简单_263.丑数
解决asp.net上传文件时文件太大导致的错误
Melody + realsense d435i configuration and error resolution
The implementation process of inheritance and the difference between Es5 and ES6 implementation
39 simple version of millet sidebar exercise
Implement a simple restful API server
"Ask every day" reentrantlock locks and unlocks
Sudo rosdep init error ROS installation problem solution