当前位置:网站首页>Measurement and acquisition of permanent magnet motor parameters (inductance, resistance, pole number, flux linkage constant)
Measurement and acquisition of permanent magnet motor parameters (inductance, resistance, pole number, flux linkage constant)
2022-07-24 01:20:00 【Earnest kitten】
Recently, I sorted out the measurement and calculation methods of several parameters most commonly used in permanent magnet synchronous motor , Share the record .
1. resistance 、 Inductance measurement
2. Polar logarithm measurement
3. Calculation of flux linkage constant
1、 resistance 、 Inductance measurement :
Before measuring, you need to know whether the motor is star connected or triangle connected , As we all know, there are :
Line current = Phase current
Line resistance = 2 * Phase resistance
Line voltage = √3 * Phase voltage
For triangle connection, there are :
Line resistance = 2/3 * Phase resistance
√3 * Line current = Phase current
Line voltage = Phase voltage
The obvious difference between star connected and triangle connected motors is that the load is different , The withstand voltage is also different . From the above relationship, it can be seen that the star connection method is helpful to reduce the voltage borne by the winding 、 Starting current 、 Insulation grade . Delta connection motor helps to improve motor power , But the starting current is also large …
Cough , sorry , Off topic .
Here is only for star connected motor measurement .
Go on, ha ~
In the case of digital bridge :
Clamp both ends of the digital bridge between any two phases for measurement , Then change the order. , Three sets of values are measured , The result after the average is divided by 2.
Inductance is the same , But the inductance of any two phases is related to the position of the rotor , Rotate the rotor in the same direction 180 In the case of kilowatt hour electric angle, it presents a similar sine wave signal .
La la la ~ So the inductance and resistance are measured .
Without digital bridge :
This can be referred to as http://t.csdn.cn/uxcJw
Of course , In addition to the above two methods, software can also be used for offline parameter identification .
Here is also a brief introduction :
Stator resistance identification method :
Because there is a permanent magnet synchronous motor in ABC Stator voltage equation of shaft West :
us: Stator voltage space vector
Ls: Equivalent synchronous inductance
When a low DC voltage is applied to the three-phase winding of a permanent magnet synchronous motor , There is no alternating current on the stator side of the motor , No rotating magnetic field , Therefore, the motor rotor will not rotate , There is no back EMF , At this time, the generated three-phase stator current will soon reach a stable value . Because the current is a stable value , The motor does not rotate , So in the steady state, the voltage equation can be almost equal to :
us =Rs * is
Because the applied voltage is known , Equivalent diagram 
Then we can see from the figure -ia /2 = ib = ic
The stator resistance is calculated from the known quantity Rs = 2/3 * UA/ia
There are many methods to identify stator inductance , For example, high frequency injection 、 Pulse voltage method and so on , This will be described in detail later .
Next is the measurement of polar logarithm .
2、 Measurement method of polar logarithm
The first is to use only DC regulated power supply .
The method is to set the voltage to 0, The limiting current of the power supply is set at... Of the rated current of the motor 5%~10%;
Then connect the positive and negative poles to any two phase lines , Turn on the power output . Rotate the motor by hand , Feel whether the motor has obvious impedance force , Otherwise, increase the current
Then rotate the motor , Record the number of times the motor gets stuck in one circle , Polar logarithm = The number of stops .
This is very simple .
The second one only uses oscilloscope
The method is to clamp a phase line of the motor with the ground wire of the oscilloscope , Any other phase line is connected to the probe , Then rotate the motor for one revolution ( shortcoming : It's not easy to control. It's just a lap ), Intercept waveform , Count the number of peaks , Divide the even value by 2, Is the number of poles of the motor .
It can be seen from the above picture that 6 Peaks , Namely 3 Polar logarithm
3、 Calculation of flux linkage constant
Flux linkage is actually the integration of voltage and time , On the contrary, the back EMF of the motor is the differential of the flux linkage , The flux linkage constant can be obtained by measuring the back EMF .
Ah ha ha , That is, as long as the back EMF is determined, the flux linkage can be calculated .
Copy only one paragraph :https://www.zhihu.com/question/360666988/answer/933930161
The force acting on the electrified conductor in the magnetic field , This will produce a magnetic field . The rotor is the so-called energized conductor , In the applied magnetic field, there will be a force . The rotor will also generate a magnetic field due to energization , Cutting the stator coil will also generate an electromotive force , This electromotive force is called back electromotive force , Because the direction of its electromotive force is opposite to the direction of the electromotive force we apply to the stator to generate the magnetic field . This process is also called armature reaction , Therefore, the voltage balance equation of the motor can generally be written :
u=R*i+v
This v It's back EMF .
Because the winding current is small when the motor is unloaded , So in this case, the error of back EMF is naturally small . Therefore, the back electromotive force at no-load should be used for calculation .
So how to measure the back EMF ? Opposite drag
But I usually get a motor , It will take us half a day to get the result , It's too troublesome .
Generally, we just need to determine a stable electrical cycle , Don't you think it's over if you find a way to make the motor rotate stably for a few rounds ?!( Lazy people do )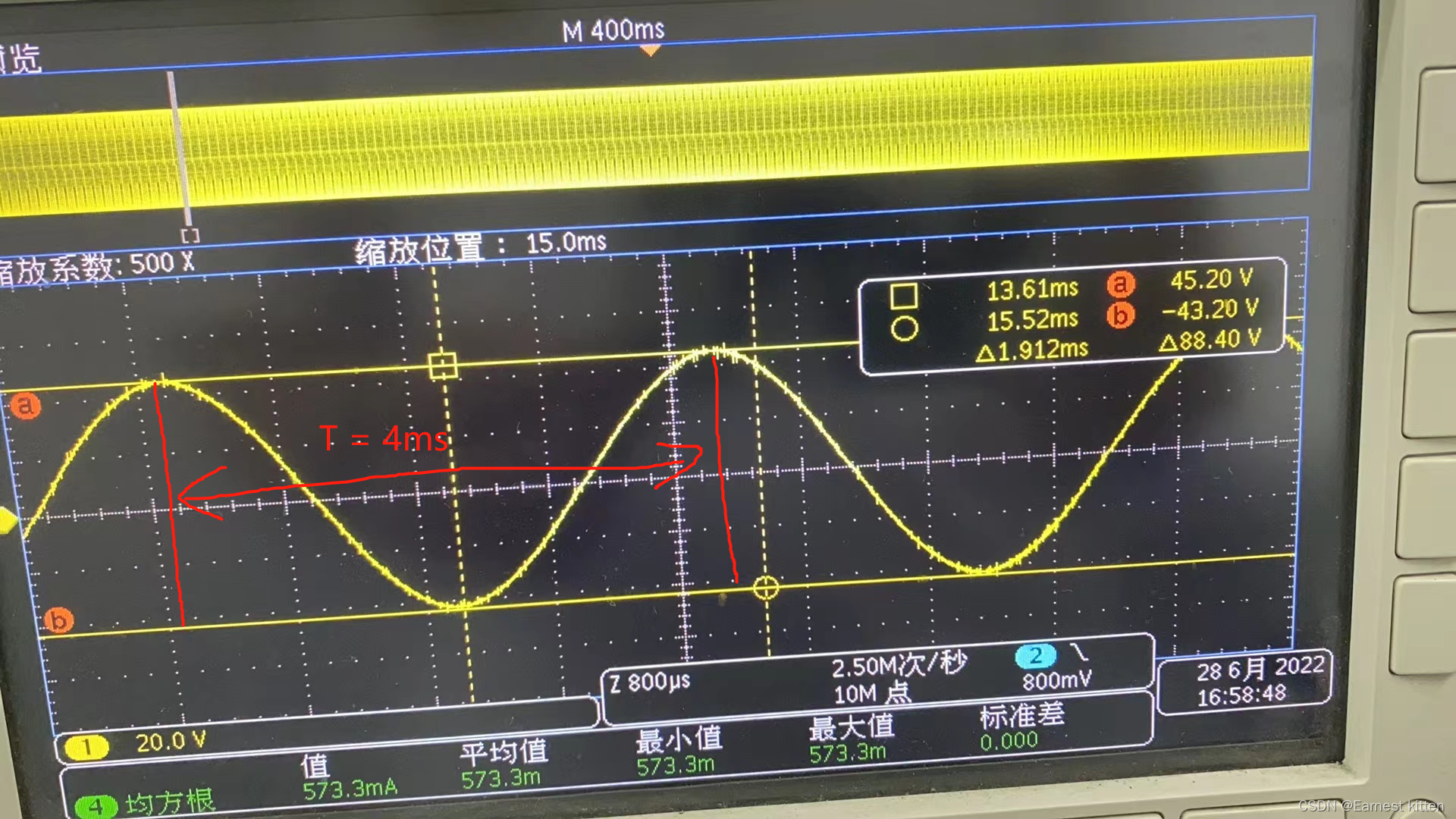
Pictured above , I casually wrote a rough value of the cycle , I forgot to take the screenshot .
Formula I summarized three calculations , In fact, the simplification is the same , Ah ha ha .
Calculation 1 I'll simplify it , As long as you measure the periodic value ( Company :s), And the peak and peak values of line voltage can be directly formulated :
example : As shown in the figure above, the peak value I measured is 88.4V, cycle 4ms = 0.004s
Then the flux constant is equal to 0.0162649.
Calculation 2 And calculation 3 It's the same .
Bye-bye , Do so much first ~~
边栏推荐
- C language: student management system based on sequence table, super detailed, all with notes, if you don't understand it after reading, please slap me.
- 爬虫requests模块的基本使用
- New infrastructure of enterprise data in the era of digital transformation | love Analysis Report
- Socket basic knowledge and various usage scenarios
- kubernetes 部署 dashboard(可视化界面)
- Sword *offer04 rebuild binary tree
- HCIP第六天_特殊区域综合实验
- HCIP网络类型,ppp会话,数据链路层协议
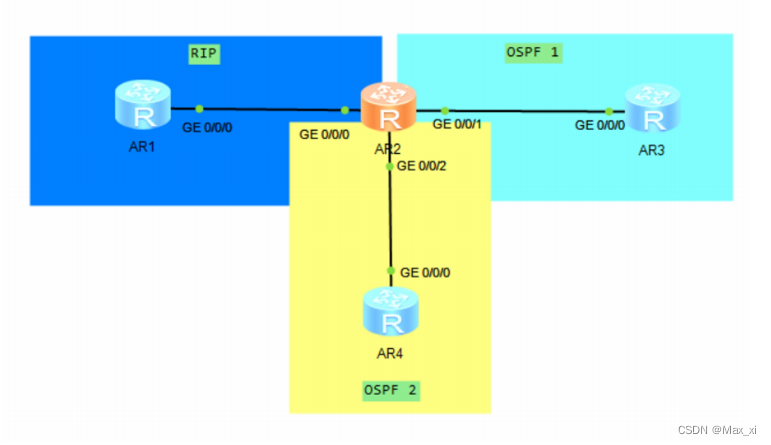
- HCIP,OSPF综合实验
- Notes: middle order traversal of binary trees (three solutions - recursion, iteration, Morris)
猜你喜欢

Static extension configuration

爬虫requests模块的基本使用

HCIP第三天笔记
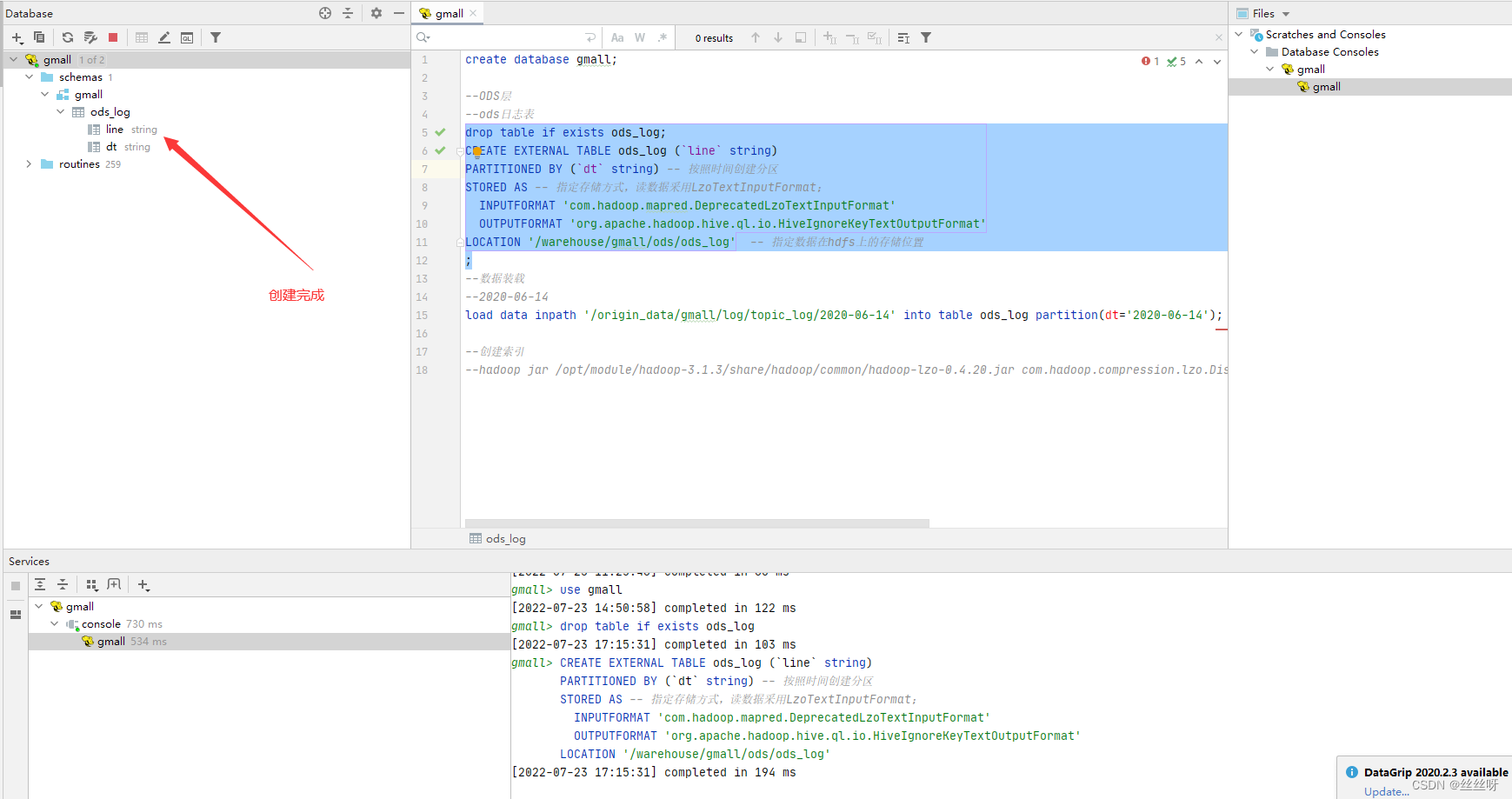
Data warehouse construction - ods floor
HCIP第八天笔记

为什么博途V17及以下的HMI面板不能与1500固件版本2.9或1200版本4.5 的CPU建立连接?
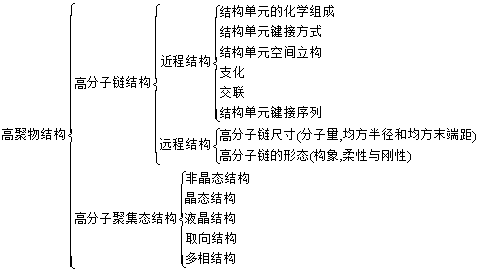
Concept, key points and summary of postgraduate entrance examination in Polymer Physics
Kubernets déploiement du tableau de bord (interface visuelle)

HCIP第一天笔记

HCIA的复习
随机推荐
Linx link, first level directory, redirection, CP and MV
Hot 100 depth first
OSI open system interconnection model and tcp/ip model
对皮尔逊相关系数进行假设检验
沃尔沃xc90的安全性如何?提供5座和7座可选
SQL CASE 多条件用法
SkyWalking分布式系统应用程序性能监控工具-上
出于数据安全考虑 荷兰教育部要求学校暂停使用Chrome浏览器
Single chip microcomputer learning notes 3 -- single chip microcomputer structure and minimum system (based on Baiwen STM32F103 series tutorials)
【複盤】關於我在錯誤的時間選錯了技術這件事
Hypothesis test of Pearson correlation coefficient
数仓搭建——ODS层
Bat Code: batch file underline rename
HCIP,OSPF综合实验
Establishment of static route
Review questions of polymer synthesis technology
爬虫requests模块的基本使用
Axure implements addition, deletion, modification and query
Matlab提取论文插图中原始数据—Fig2Data工具
Notes: binary tree pruning (recursion, iteration)